特集論文

三菱電機産業ロボット用力覚制御システム
2013年4月公開【全4回】 2013年6月公開【全4回】
名古屋製作所 藤島光城 村田健二
第2回 ロボット用力覚制御システムの機能と制御方法(中)
2.2 力覚制御とは
力覚制御は、ロボット周辺物と接触したときの反力や柔らかさがあらかじめ設定した値になるようにロボットを制御する機能である。
2.2.1 力指令制御(押し付け力の制御)
力覚制御における力指令を設定すると、力制御有効時にロボットは力指令にあらかじめ設定した反力(N)が得られるように位置を補正しながら自立的に動作する。ただし、外力が作用していない場合(接触していない場合)は、力指令値の方向と反対方向にロボットが動作するが、このときの動作速度は、2. 3. 1項で述べる力覚制御ゲインに比例する。
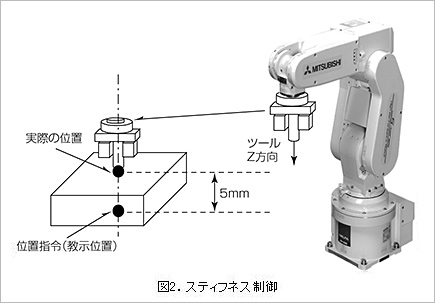
2.2.2 スティフネス制御(柔らかさの制御)
スティフネス制御におけるロボットの柔らかさはスティフネス係数で設定する。値が大きい程、ロボットが硬くなり、値が小さいほどロボットが柔らかくなる。
図2は、ツールZ軸のみスティフネス制御を行った場合の例であり、Z方向のスティフネス係数を0.5(N/mm)とし、教示位置を接触面より5mm下の位置を教示した場合、接触面に発生する力Fは以下のようになる。
F=0.5(N/mm)×5(mm)=2.5(N)
2.3 力覚制御の調整
実際に力覚制御を精度良く行うには、力覚制御の応答性(ゲイン)や、振動(ダンピング)を抑制する必要がある。
2.3.1 力覚制御ゲイン
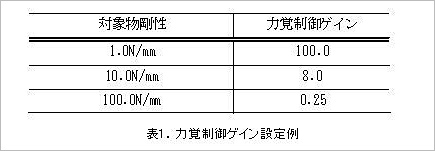
力覚制御ゲインは、力覚制御の応答性を調整するパラメータである。設定値が高いほど、力指令・スティフネス指令に対する応答性が高くなるが、上げすぎると接触時に過敏に反応してしまい動作が不安定になる。
この力覚制御ゲインは接触対照物の剛性の影響を受けるため、対象物に応じてゲイン設定を変更することが望ましい(表1)。ただし、力覚制御ゲインが0の場合は、力覚制御による補正を行わないため、通常の位置指令となる。したがって動作途中でゲイン設定を変更すると、スティフネス制御から位置制御、位置制御からスティフネス制御へ移行できる。
ゲイン調整例を次に挙げる。
- 力覚制御(力指令制御、又はスティフネス制御)を有効にしている軸方向に、JOGモードで低速動作(JOG OVRD(Override)5%程度)させ、作業対象物に接触させる。
- 接触の際に動作方向と反対側に跳ね返るような動作をする場合は、ゲインを下げる。
2.3.2 ダンピング係数
力覚制御(力指令制御又はスティフネス制御)による動作が振動する場合にダンピング係数を調整する。値を大きくする程、振動を抑制する効果が増すが、ワークが接触した瞬間など、急激な力変化に対する補正動作が遅くなるため、ワークに作用する力が増加する。実際のダンピング調整は、先に述べた力覚制御ゲインの調整が完了してから必要に応じて変更する。
製品紹介

- 要旨 三菱電機産業ロボット用力覚制御システム
- 第1回 ロボット用力覚制御システムの機能と制御方法(上)
- 第2回 ロボット用力覚制御システムの機能と制御方法(中)
- 第3回 ロボット用力覚制御システムの機能と制御方法(下)
- 第4回 力覚制御システムの適用事例