特集論文

三菱電機産業ロボット用力覚制御システム
2013年4月公開【全4回】 2013年6月公開【全4回】
名古屋製作所 藤島光城 村田健二
第4回 力覚制御システムの適用事例
3. 力覚制御システムの適用事例
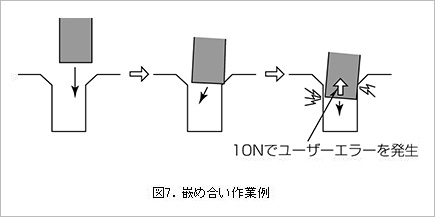
3.1 嵌め合い作業
水平方向を柔らかくした状態で、押し込み方向に挿入動作を実施する。挿入時に指定以上の力がかかった場合は、エラーを発生させて動作を中断することもできる。このような嵌め合い作業やエラー検知が簡単にできる(図7)。
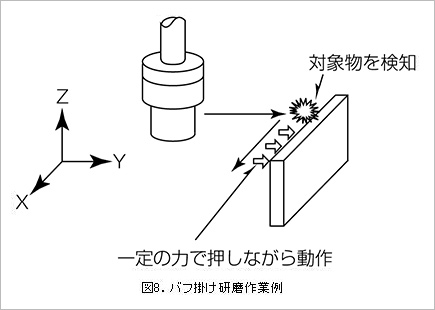
3.2 バフ掛け研磨作業
Y軸方向に動作しながら、対象物を探す。対象物が見つかったら、対象物に一定の力を加えながらX軸方向に動作する。指定以上の力がかかった場合は、エラーを発生させて動作を中断する(図8)。
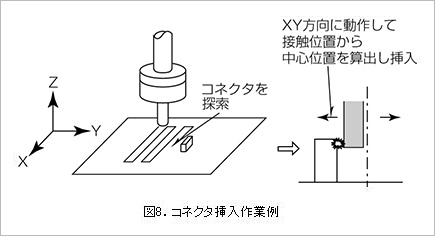
3.3 コネクタ挿入作業
XY平面上のコネクタを探索する。コネクタが見つかった場合は、その中心位置のXY座標値を算出し挿入する(図9)。
4. むすび
ロボットの知能化の中でも重要な力覚制御システムの機能と制御、及びロボットへの適用例について述べた。力覚センサは精度が要求される機械部品の嵌め合い作業や、バフ掛けや研磨作業、コネクタ挿入作業等に使用でき、また、エラーリカバリーなどの用途や、教示省力化、ログデータによるエラー発生時の不具合解析等応用範囲も広い。
今後、力覚センサの応答性能向上や応用機能の“easy to use”開発を行い、顧客に一層満足してもらえる開発を推進する。
参考文献
(1)劉 正勇、ほか:力制御機能搭載ロボットコントローラの開発、第12回計測自動制御学会システムインテグレーション部門講演会(2011)
(2)藤島光成、ほか:産業用ロボットビジョンの活用事例と今後の展望、ロボット(特集)、No.200、26~30(2011)
(3)牧田裕之、ほか:FA機器とビジョンシステムによる連携ソリューション、計測技術、38、No.11、38~42(2010)
製品紹介
