特集論文

三菱電機産業ロボット用力覚制御システム
2013年4月公開【全4回】 2013年6月公開【全4回】
名古屋製作所 藤島光城 村田健二
第3回 ロボット用力覚制御システムの機能と制御方法(下)
2.4 力検知機能とモニタリング
力検知機能は表2の設定ができ、これらの機能を使って動作変更や、力覚データのモニタリングによる教示の省力化、力覚データのロギングが行える。
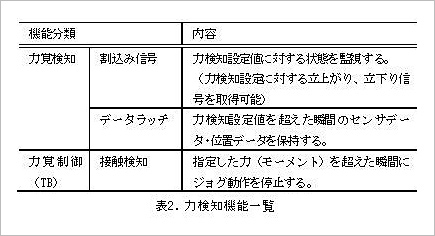
2.4.1 力覚検知による教示容易化
力覚制御中にあらかじめ設定した検知値を超えた場合、自動的にJOG動作を停止し、ブザーが鳴りオペレータへ通知する。これによってワークや力覚センサの保護ができる。また、ティーチングボックスに表示される力覚センサデータの表示欄の色を変更して視覚的にも認識できる。
また、スティフネス制御でロボットを柔らかく制御し、嵌め込み形状に倣いながら挿入完了位置をティーチングすることができるため、教示作業が省力化できる。
2.4.2 力覚モニタ機能
力覚モニタ機能で力覚センサの現在値と最大値をリアルタイムで表示し、例えば力覚モニタに表示され力データを見ながらワークとの接触状態を見て、位置を教示することができる。また、力覚モニタには力覚パラメータ編集画面があり、力覚制御の制御モード・制御特性の変更や設定内容の確認が簡単に行える(図3)。

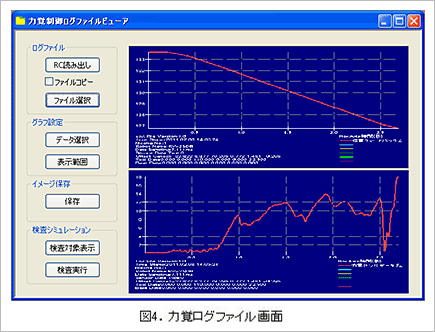
2.4.3 ログファイル・ビューア機能
力覚データのログファイルはRT ToolBox2の力覚制御のメイン画面からボタン操作によって、位置と力の関係を簡単にグラフ表示ができる(図4)。また、専用命令によってロボットコントローラ上でロギングしたデータをFTP経由でパソコンにファイル転送し、組立て品質を後からトレースできる。
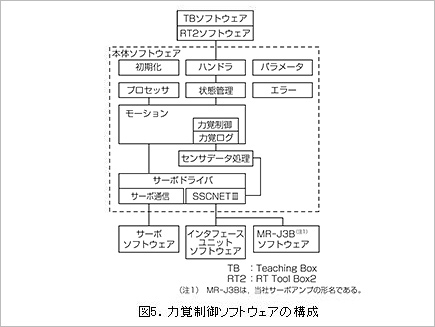
2.5 力覚制御ソフトウェア
力覚制御ソフトウェアの構成を図5に示す。力覚インタフェースユニットソフトウェアからSSCNET III経由で力覚センサデータを受信するセンサデータ処理、そのデータを用いて力覚制御、力覚データのロギング処理をロボット本体制御ソフトウェアのモーション制御部でリアルタイムで処理する。制御の流れを図6に示す。
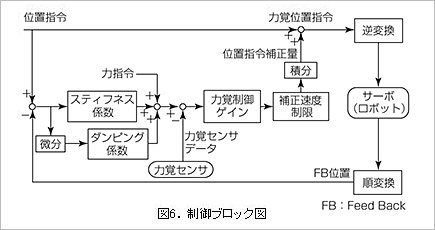
力覚制御の処理は、モーションタスクで生成された位置指令に対して最新の力覚センサデータを用いて補正を行い、それを精補間してサーボへ出力する。力覚センサデータは、SSCNET III通信経由で定周期に送られてくるが、できるだけ最新のデータを力覚制御の処理に反映させるため、定周期で実行するセンサデータ処理を新規に追加し、力覚センサデータの取得や許容値をチェックしている。
製品紹介

- 要旨 三菱電機産業ロボット用力覚制御システム
- 第1回 ロボット用力覚制御システムの機能と制御方法(上)
- 第2回 ロボット用力覚制御システムの機能と制御方法(中)
- 第3回 ロボット用力覚制御システムの機能と制御方法(下)
- 第4回 力覚制御システムの適用事例