業種別ソリューション 電気・電子分野

メモリカード
組み立て
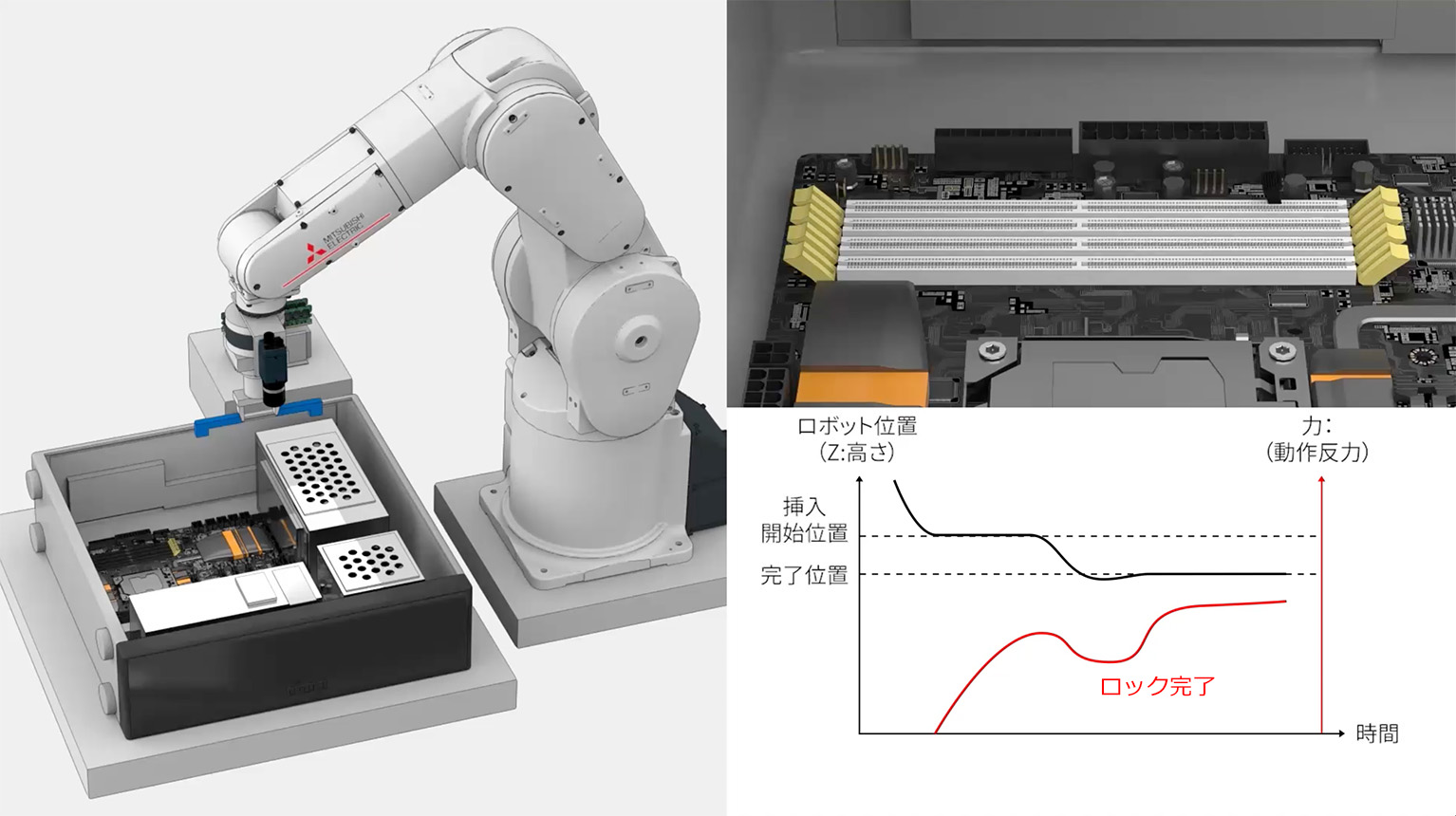
1台のロボットでメモリカードを取出、挿入。力覚センサを用いることで圧力を感知し、異常/組み付け完了を検知。
メモリカード組み立ての例

課題と解決策

課題
部品の加工精度(寸法)のバラツキや、上流工程での組立精度のバラツキに影響されない自動化の要求が増加。部品を保護しながら精密な組立が必要組立時に、一定時間、一定の力で押付することが必要な場合が有り、またその記録を残すことが必要な場合も有り。

解決策
- ロボットがメモリ部品を取り出し
- ビジョンセンサを用い、ワークずれを認識
- ロボット内でのベクトル演算手法により作業位置を計算、補正後の位置にメモリ部品を近づける
- 基板側のスロットにメモリ部品を挿入(倣い制御)。その間、力覚センサで異常の有無 及び組み付けが完了を検知
Point
- 【部品・製品ロスの削減】
- 部品組立中のワークの損傷などを力覚センサで検知し防止
- 【トレーサビリティ管理】
- 組立時の力覚データをリアルタイムに収集、データを品質管理に活用可能
- 【位置ズレを自動で補正】
- ワークの加工精度や設置位置のバラツキを力覚センサやビジョンセンサで補正し設備の安定稼働に貢献
ワークの向きによる異常発生時
ワークが前後逆に配置された状況。挿入動作時、力覚センサで圧力異常を検知。ワークの破損前に動作を停止。
関連製品




全工程に共通するソリューション








導入事例
