民間で世界初!? 千円札大の極小ローバーが、月を駆ける
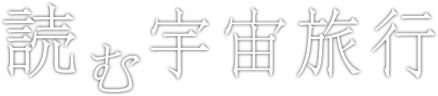
2022年中ごろ、民間ローバーが月面を走ろうとしている。その名は「YAOKI」。七転び八起きが名前の所以だ。転んでもひっくり返っても崖から落ちても、数百G以上の衝撃に耐え、走り続けるタフなローバーだ。特徴は世界最小・最軽量のローバーであること。大きさは15cm×15cm×10cm。千円札の長さがちょうど15cmだから千円札大の月面車とも言える。そして驚くのは、YAOKIがたった一人の日本人技術者によって開発されたということ。
今、NASAや中国、日本などの宇宙機関だけでなく、世界中の民間企業が月を目指す「月ラッシュ」のさ中にある。YAOKIは米国のアストロボティック社の月面着陸機ペレグリンに搭載され、ULAのヴァルカンロケットで2022年中ごろに打ち上げられる予定だ。NASAによる月面商業輸送サービス(CLPS)の初打ち上げという点でも世界の注目を集める。アストロボティックはNASAからCLPSに採択されたスタートアップ。着陸機の約半分にNASAの荷物を、残る半分はビジネスで使うことが許可されている。ビジネス枠の十数個の荷物の一つとしてYAOKIが搭載されるというわけ。同着陸機にはYAOKIを含め3つのローバー(うち民間ローバーは2機)が搭載されるが、打ち上げが2022年中ごろに実現すれば、民間ローバー世界初になる可能性が高い。
YAOKIの特徴は?開発の苦労は?月面で何をやろうとしているのか。YAOKIを開発したロボットクリエイターで(株)ダイモンCEO中島紳一郎さんに伺った。

月の重力を模擬した実験後、車輪を変更
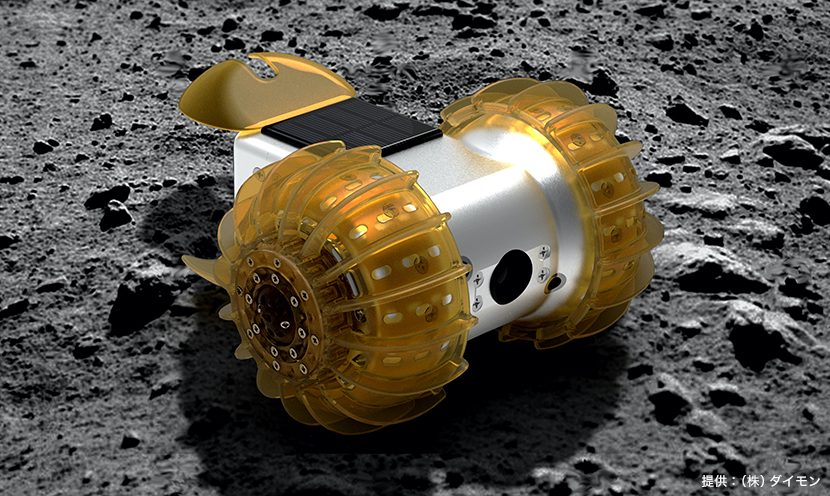
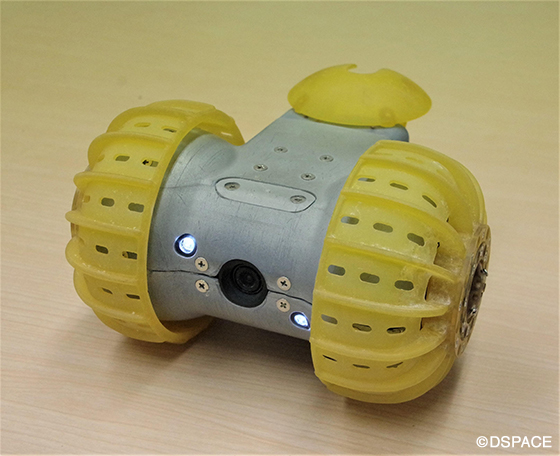
初めて対面したYAOKIは「小さい!」「軽い!」そして「操作がめっちゃ簡単!」小さいコントローラー(家庭用ゲームのコントローラーより簡単!)で操作できる。
改めて特徴を教えて下さい。「小さくて軽いことです。月面ローバーは通常は4輪ですが、小型・軽量化のために2輪にしました。重量も半分になります。尻尾のようにのびる部分で車体を支えます」(中島さん)。小型軽量なら打ち上げコストが安くなるし、運搬も楽(取材当日も、中島さんは中型のスーツケースに何台ものYAOKIを詰めて登場。道行く人は、まさかあのスーツケースの中に月面を走るローバーが入っているとは想像だにしないだろう)。搭載する着陸機の目線からすれば、傷つけられるリスクが少ないし、すき間にいれられる。
もう一つの特徴は上下、左右対称であること。「車輪は円筒形でなく、球を半分に割った形状にして、ボディを覆っている。転んでも起き上がることができるのはタイヤが球面になっているから。砂地の走行に適した形にしています」
月面と言えば、特徴は地球の6分の1の重力と特殊な砂レゴリス。どんな対策をとっているのか。 「車輪の形状を月面専用にカスタマイズしました。一つはグラウザ(爪)の部分。自動車のタイヤは溝が切ってあるから滑らない。最初はギザギザの部分を高くすれば滑りにくくなるのではと考えていました」。だが、今年の6月に落下実験で月面の重力を再現し、月の模擬砂の上を走らせたところ、思いがけない結果が得られたという。
「レゴリスは粒子が細かくてとげとげしているので結合性が高い。何が起こるかというと、車輪にレゴリスが突き刺さると固まってしまう。車輪が回ろうとする際の抵抗が思った以上に大きかったのです。そこで車輪の爪の高さを少し低くしました」
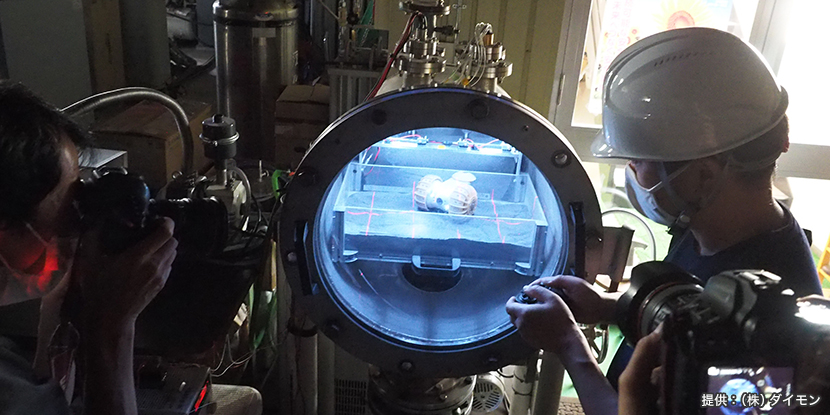
植松電機では真空チャンバーに月の模擬砂も入れた状態でYAOKIの走行性能も確認した。砂を入れた状態で真空にすると真空ポンプが壊れる可能性もあるが、植松社長は「やってみようか。大丈夫そうだね!」と果敢にチャレンジしてくれたそう。
振動試験も大変だった。「九州工業大学で、ロケット打ち上げ時の振動試験を行いました。同大学では過去に多数の衛星の振動試験を行ってこられましたが、その中で一番条件が厳しいと聞きました」。そばにいるのが怖いぐらいの振動で、何回かトライして合格できたそう。北は北海道、南は九州へ。日本を駆けまわって試験をクリア。現在は年内のフライトモデル納品に向けて最終的な詰めの作業を進行中だ。
狙うのは「月の縦穴」
落ちても壊れないのもYAOKIの特徴だ。「ドローン業者の方が間違って高さ100mの場所からYAOKIを落としてしまったことがあります。部品は一部壊れましたが、ちゃんと走ったのです。その時の衝撃は数百G以上あったと思います。地上で100mの高さから落ちても走るということは、月面では600mの高さから落としても大丈夫ということになります」(中島さん)
YAOKIは搭載したバッテリで月面を走る。6時間は走行可能だ。操作は米国ピッツバーグにあるアストロボティック社から。YAOKIは月面で撮影した映像を着陸機にWi-Fi通信で送る。さらに着陸機から地上に送ってくるまでには10秒~数十秒の遅れがあるとみられるが、その遅れを見越して、地上から操作することになる。
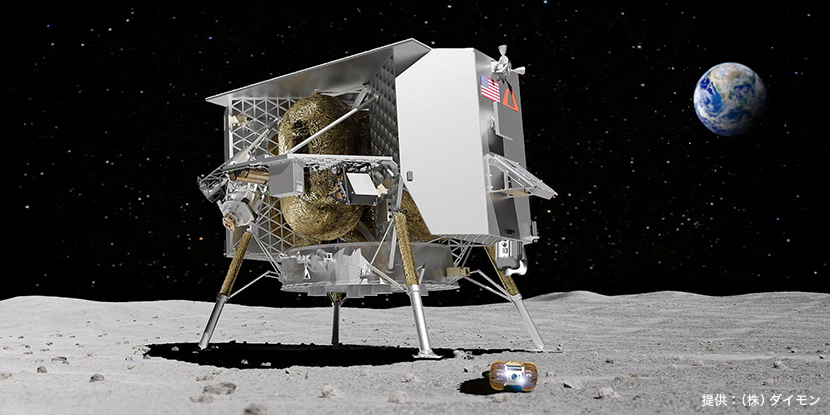
ペレグリンが着陸するのは、月の「死の湖」(LACUS MORTIS)。近くには月の地下空洞に繋がる「縦穴」があることで知られる。将来的な有人月面基地の候補とも考えられているが、縦穴の探査ができるのは、今、世界でYAOKIだけだと中島さんは胸をはる。「600m落下してもYAOKIは壊れませんから。問題は通信。今回、着陸船とYAOKI間でWi-Fi通信が可能な距離は数百メートル。YAOKIは月面着陸後、まず着陸機周辺を走行します。その後、縦穴が走行可能な距離にあれば、探査を狙う。ただし落ちていく途中で通信がぶちっと切れる可能性はあります」。その映像が楽しみだ。
駆動系の技術者ならではのこだわり
中島さんはそもそも、ボッシュなどで自動車エンジニアとして駆動系の開発に携わっていた。2012年にダイモンを起業。その後民間月面レースGoogleルナXプライズ優勝を狙っていたHAKUTOにボランティアとして携わる。だが、HAKUTOが4輪のローバーを採用したことで、2輪車を推奨していた中島さんは自社開発の道を選択した。
起業後は、別の事業で得た収益をローバー開発にあてた。YAOKIは小さなローバーだが、車輪の曲率、高さ、車輪をボディに取り付ける際の遊びなど一つ一つの寸法や機能をとことん突き詰め、こだわり抜いた。駆動系エンジニアの経験と技術を注ぎ込んだのだ。その根底には「たった一人の会社なので、他にない圧倒的な優位性をもたせるところまで進化させなければ勝負にならない」という思いがあった。

タイヤの中は通常は使われないスぺ―スだが、ボディを球面にしてタイヤを被せる形にすることで、小型ながらボディの容積を増やした。球面型のボディによって、タイヤから入ってくる砂を外に吐き出し、タイヤが小さくても走破性が阻害されない効果があるという。小さいながらYAOKIはアイデアと技術の塊なのである。
3か月でスピード契約—世界初を逃す理由はなかった
2019年4月にYAOKIを完成させると、まず主要特許を出願。5月に伊豆大島で映像を撮影しYouTubeにアップすると同時に、世界の宇宙スタートアップにメッセンジャーで連絡した。「興味があったら連絡をちょうだいね」と。
「一番ポジティブな回答が届いたのがアストロボティック社でした。ちょうどNASAの民間月面輸送サービスCLPSに同社が採用された直後だったんです。NASA機器の輸送で着陸機の半分を使い、残り半分のビジネス用のスペースについて、募集を始めたところでした」(中島さん)
締め切りを聞くと3か月後の9月だった。技術的な条件はクリアしていたから、期限までに輸送費を支払えば契約は成立する。「いつか月面探査に結び付けばいいなとは思っていましたが、正直言ってそんなに早くチャンスが来るとは思っていなかった。世界初を狙ったわけではなかったが、逃す理由もなかった」。月への輸送は1kgあたり約1.2億円。YAOKIの場合、約500gだからおおよそ半額となる。大急ぎで資金調達のめどをたて、9月に契約書にサインをし、10月に初回の支払いを行った。
月のローバーを地上から子供たちが操作する

今回のミッションのミニマムサクセスは「民間世界初の月面走行」。着陸機周辺を走って月面の映像を地上に送れば、成功だ。「それをやりつくして目の前に縦穴があれば、最後は落下させ、通信が切れるギリギリまで映像を送ることにチャレンジしたい」中島さんは言う。
そして月への挑戦は続く。「ミッション2も契約が見えてきた」(ダイモン取締役の三宅創太さん)。ミッション2では複数機を月面に送り、洞窟探査を狙う。洞窟の手前に通信用にローバー一機を置き、落下していくローバーからの映像を着陸機に送る。「通信の連携ができて初めてYAOKIは真価を発揮します」。
国家機関が莫大な予算をかけて開発するのが当たり前だった宇宙開発に民間企業がどんどん参入。そしてついに一人で月面を目指す時代に。正直、驚いたけれど、中島さんに言わせれば「一人だからこそできた」。
「チームで役割分担があると、新しいことになかなか挑戦ができない。やってダメだったらみんなに迷惑をかけてしまうという意識が働いて、妥当なところに落ち着いてしまうんです。でも一人なら、自分さえよければどこまででもできる」。だから、とんがったものを開発できる。
今、ダイモンには中島さんを含めて8人の仲間がいる。「開発して、アストロボティック社と契約までは頑張ったがその先は一人のエンジニアには無理。契約や交渉や今後の事業展開は、チームでないと広がらない」
チームで狙うのは?「YAOKIが小さいということは、たくさんのローバーを月面に置けるという事。将来的に月面にローバー用のシェルターを打ち上げ、月の夜間にローバーを避難させることができれば、月面で恒常的に活動できるようになる。そうなれば、ローバーの操縦を一般に開放できると考えています」
私たちも月にいるローバーを操縦できるということですか?
「そうです。ちょっと月面に行ってみようか、という感じで。VRにすれば自分が月面を動いている感覚が得られると思います。ぼくらのキャッチフレーズは『みんなで楽しもう』です」。
- ※
本文中における会社名、商標名は、各社の商標または登録商標です。