月をあきらめない。ispace、新大型ランダーで2028年高精度月着陸へ

2025年6月6日未明、ispaceの月着陸船「レジリエンス」が月の高度192m付近を最後に通信途絶。目標から近い地点(南約282m、東約236m)にハードランディングしてからわずか4か月。ispaceは10月2日、大型の新月着陸船(シリーズ3ランダー)の熱構造モデルを記者公開した。この着陸船は月の南側の高緯度地方への高精度着陸を目指し、2028年に打ち上げを予定している。
ispaceは2023年4月(HAKUTO-Rミッション1)と2025年6月(同ミッション2「レジリエンス」着陸船)、月着陸に2度挑戦。あと一歩のところまで迫りながら着陸成功には至っていない。だが決して、月着陸を諦めない。「ミッションの継続が大事」と袴田武史CEOは常々言い、ミッション2の成否によらず、ミッション3でispace米国法人が開発する月着陸船の打ち上げを2027年に、続くミッション4では経済産業省のSBIR補助金を受け、大型の月着陸船を開発し打ち上げることを計画していた。だからこそ、立ち止まってはいられない。
搭載荷物は最大30kg→最大数百kg。重心は低く、平らに
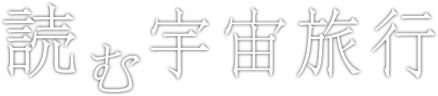
10月2日、JAXA筑波宇宙センターで公開されたフルスケールの熱構造モデルと対面して感じたのは「大きい」、「脚が太い」、「どっしり感がある」ということ。縦長でやや細身の印象があったレジリエンス月着陸船と比べて重心が低く、着陸脚も太く、全体的にどっしりした印象だ。
具体的には、レジリエンス月着陸船が最大30kgの荷物を搭載していたのに対して、シリーズ3ランダーは最大数百kgの荷物を搭載できる。その分、例えば月着陸時には、減速のための逆噴射に燃料が多く必要で、燃料タンクは大きくなる。
月着陸船のサイズは高さ約2.3m×幅約2.6m(レジリエンス)が高さ約3.6m×幅約3.3m(シリーズ3)に。重量は340kg(燃料がない状態)が約1000kg(同)と、約3倍に大型化した。

新着陸船の形についてispaceの氏家亮CTOは「ミッション1と2の教訓を活かして、ランダーの重心をなるべく低くして(着陸船の形状を)平らにした。搭載する荷物を展開していくという点でも、メリットが出るようにしました」と狙いを語る。氏家氏が2018年にJAXAからispaceに転職した際はレジリエンス月着陸船のコンセプトは既に出来上がっていたので、ゼロから作り上げる月着陸船は今回が初めて。着陸脚はレジリエンス月着陸船ではロケット搭載時に収納され、打ち上げ後に展開していたが、今回は固定式にした。
JAXAの協力を得て高精度着陸を目指す

レジリエンス月着陸船との違いは、搭載重量の増加だけではない。ミッション4の大きな特徴は、「高精度着陸」を目指すこと。具体的には2024年1月に、月面へのピンポイント着陸に世界で初めて成功した、JAXAの月着陸機SLIMの技術が移転されることになる。ispaceはJAXAの協力を得て、精度を上げた着陸を目指していくそうだ。
着陸ターゲットはどこか。現在、月の南極にあると推定される水資源が世界の関心事であり、月着陸機の多くが極域付近への着陸を目指している。だが氏家CTOによると、「月の極域での高精度着陸は、まだ研究開発が必要な要素がある。太陽の入射の関係で影の影響が(画像照合航法に)色濃く出てしまうところがあり、技術的にはまだ難しい」。
SLIMが高精度着陸で用いた画像照合航法は、まず着陸機が飛行中に撮影した月表面の画像からクレーターを抽出。クレーターの配置パターンと探査機がもつクレーターの地図を比べて、「このクレーターのパターンが見えるのは月面上のここだ」と自分の位置を1~2秒で特定するもの。SLIMはその手法を太陽光の影の影響が少ない、月面の中緯度地域で実施した。一方、極地域では太陽光が横方向から差し込むため、影が画像に大きく映りこんでしまう。そこで地図データとの照合が難しくなるという技術的課題があるわけだ。
そこでミッション4では極でなく、まずは高緯度地方への高精度着陸を目指す。それにしても大型の月着陸船で高精度着陸というのは、ミッション1、2に比べてかなり技術的ハードルが高くなるのではないか。この点を氏家CTOに聞いた。
「まず大型化のハードルについては、熱構造モデルによる試験を早い段階で実施することで、大型化した構造への影響を把握し、そこから設計を詰めていく。高精度着陸については、着陸成功の経験があるJAXAとしっかり協力をしながら、着陸の確度を高めていく」とのこと。
試験—打ち上げはH3ロケットを想定?

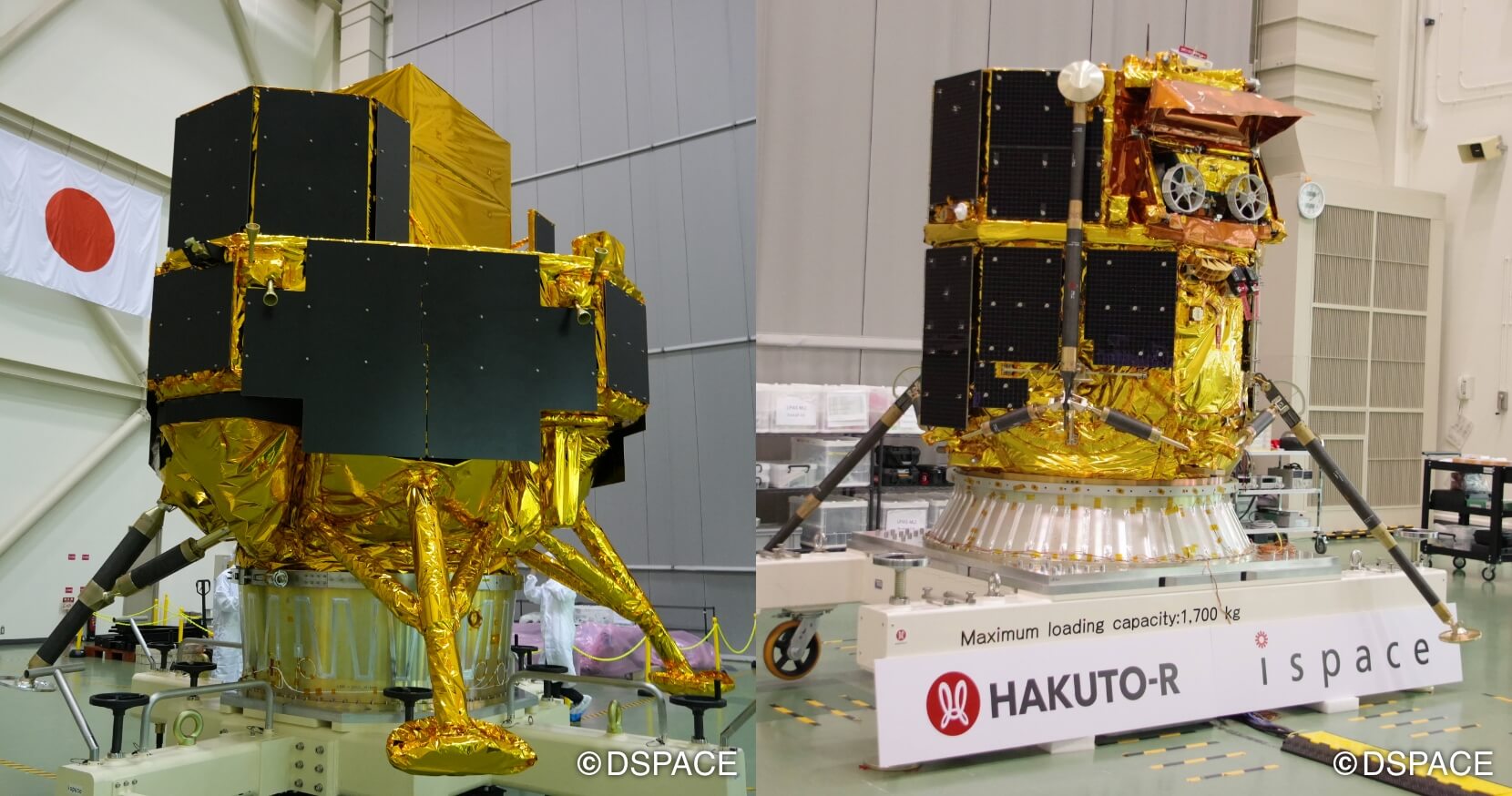
2025年4月からJAXA筑波宇宙センターで、ispaceはシリーズ3ランダーの熱構造モデルを使った試験を実施。ロケット打ち上げ時に月着陸船が受ける激しい振動や音響の試験、さらに宇宙飛行中の熱環境(マイナス140度~130度)を真空チャンバー内で模擬する熱真空試験の3種類の試験を実施した。試験の結果、大きな問題は見つからず、熱・構造の基本設計審査を完了。この後、構造の認定試験モデルを作って詳細設計を固めた後、実際に飛ぶフライトモデルの製造に入る。
氏家氏は「品質を上げ信頼性を上げていくのはもちろん、これまでの2機の月着陸船で余裕をもって設計をしていた部分について、(試験や飛行の経験から)削れるところが見えてきた。もっと軽量化できると考えている。民間の輸送ビジネスとして効率的な解を見つけていきたい」と意欲的だ。
なるべく軽く、かつ厳しい宇宙飛行に堪えうる強靭な機体に仕上げるのが宇宙機開発の大命題。月着陸直前まで迫った2機の月着陸船の知見と経験が、この新型ランダーに投入される。最終的にどんな形に仕上がっていくかが楽しみだ。
袴田CEOによると、このシリーズ3ランダーは技術実証機でなく、商業化のモデル。その最初の飛行が2028年に打ち上げ予定のミッション4で、経済産業省のSBIR(中小企業イノベーション創出推進事業)に採択され、5年間で最大120億円の補助金を得て、開発が進められている。SBIRの公募書類には「打上げ手段は我が国の基幹ロケットを用いることが推奨される」と書かれている。ispaceは日本だけでなく世界のロケットで打ち上げられるよう開発しているというが、H3ロケットでの打ち上げを期待したい。
搭載する荷物は?

シリーズ3ランダーは、大型の荷物は上部に、数10kg級の小さめの荷物を搭載できるスペースが下部に4か所ある。小型の月面車などは下部に搭載することが想定される。
ミッション4に搭載する荷物のうち、現在決まっているのは東京科学大学の水資源探査用センサー(テラヘルツ波センサシステム)を搭載した100kg以下の小型衛星システム。月着陸前に小型衛星を適切な軌道で切り離し、衛星は月の周りをまわりながら水資源について探査活動を行う。そして台湾国家センサーのベクトル磁力計及び紫外線望遠鏡の搭載も決まった。そのほかのペイロードについても「海外を含めてマーケットを広げていきたい。積極的に海外の宇宙機関や民間のお客様に交渉している」と袴田氏は攻めの姿勢を続ける。
ミッション2で問題になったあのセンサーは?

ispaceのミッション1では高度計のソフトウェアが、2では高度計のハードウェアが原因で着陸成功に至らなかった。いずれも高度計には民生品を使用していた。シリーズ3ランダーでは課題となった高度計について、過去に飛行実績があるフライト品(高価だが信頼性は高い)を使うのか、それとも試験や検証を重ねた上で民生品を搭載するのだろうか。
氏家CTOは「(高度計については)フライト実績のあるものも既にリストアップしている。現在、専門家を含む改善タスクフォースやJAXAさんとも、その点について話している。外部の意見を頂きながら、決めていくことになる」と答えてくれた。
月着陸時の誘導制御のソフトウェアは、ミッション1、2ではアポロ月着陸船で実績のあるドレイパー研究に外注していたが、ミッション4ではispaceが開発するそうだ。
「新型かつ大型となるこのランダーは、これまでの技術的挑戦の集大成であり、ispaceのミッションへの挑戦と進化を象徴する存在」と氏家CTOはコメント。経済産業省宇宙産業課の高濱航課長は「ミッション4の月面着陸は民間主導の月面開発を一気に加速させる起爆剤になると期待している」と語った。月への着陸が成功するその日まで、粘り強く挑戦を続けてほしい。
- ※
本文中における会社名、商品名は、各社の商標または登録商標です。