アルテミスIIに続け!ispace 次の月着陸は2028年。「失敗に学ぶ」改善策とは

4月2日(日本時間)、4人の宇宙飛行士を乗せたアルテミスIIがついに飛び立った! 徐々に小さくなる天体・地球。そして逆に大きくなる月の映像を私たちは約半世紀ぶりに、Orion宇宙船に共に乗っているかのような臨場感で味わった。これぞ、21世紀の月探査。7日(日本時間)には、地球から約40万6771kmの距離に到達。アポロ13号の記録(40万171km)を塗り替え、人類で最も遠い距離に達したことになる。
3月末には、NASAのジャレッド・アイザックマン長官によって民間を活用し、無人月面着陸を加速させること、今後7年間で約3兆円を投じ月面基地建設を進めることなどが発表された。
そんな中、月着陸を目指すispaceが記者会見を開いた。新たな打ち上げ計画の発表と、2度の月着陸失敗に対して第三者専門家チーム(改善タスクフォース委員会)がまとめた「7つの提言」の説明が行われた。
新打ち上げ計画。日本のミッションを2028年、2029年に。米国ミッションを2030年に

会見では今後の月着陸計画に関して、大きな変更点が二つ発表された。まず一つ目は月着陸機のエンジンの変更だ。
当初、ispaceの米国法人ispace-U.S.はNASAの商業月面輸送サービス(CLPS)に採択されている月着陸機を、2027年に打ち上げる予定で開発を進めていた。その着陸機に搭載予定だった新型エンジンの開発が遅れていることから、新たな代替エンジンに変更することを決めた。代替エンジンは既に月面着陸ミッションで使用実績もあるという。
二つ目は日本とアメリカ、それぞれに進めていた月着陸機のモデルを統合した新モデル「ULTRA」の発表だ。見た目は、日本のモデルと似ているが、月の裏側にも着陸できる仕様にするため、通信系は米国モデルの物を採用するなどしている。
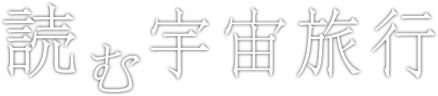
これらの大きな変更に伴って、打ち上げ計画が再編成された。
大きな変更はアメリカで2027年に打ち上げが予定されていたCLPSミッション。NASAの荷物を月の裏側に運ぶという重要な任務を追っていたが、この打ち上げを2030年に延期する予定。
一方、日本の月着陸ミッションは変更なし。2028年に経済産業省のSBIR補助金を受け、大型の月着陸船を打ち上げる。続いて2029年には宇宙戦略基金を受け、月の極域での高精度着陸を目指す。
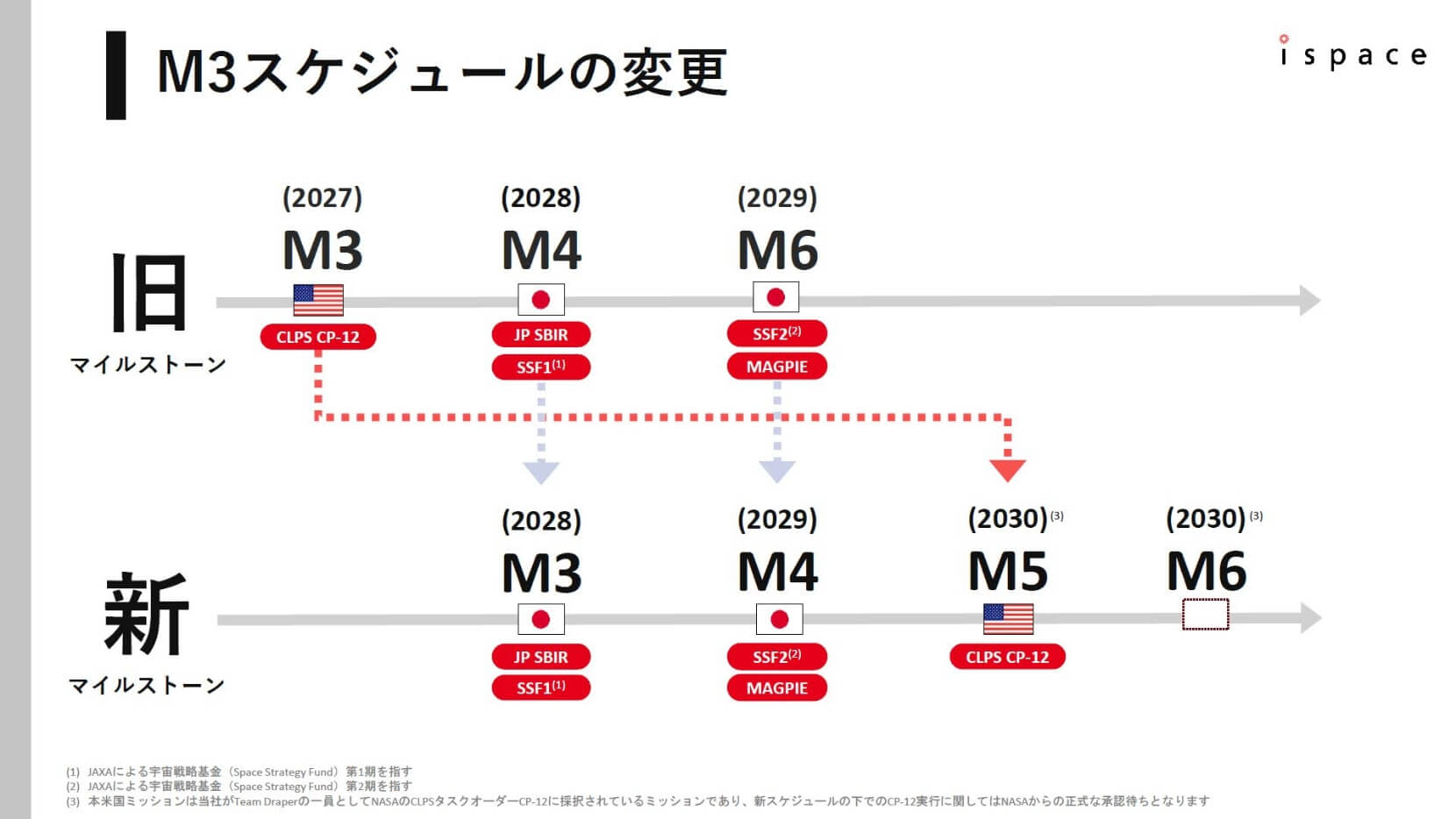
そして新たに加わったのが、衛星を月周回軌道へ投入し、高速の通信機能や測位サービスを提供する「ルナ・コネクトサービス」だ。月で活動する上での課題の一つが実験データなどの通信環境だ。通信バンドが細いとなかなか大容量のデータを送ることができない。その課題がクリアされれば、月面での実験などがやりやすくなる。同様に月面上を移動するには測位機能が必要となる。つまり、月面に顧客の荷物を運ぶだけでなく、運んだ後の月面活動を多彩に効率的に行う環境を整えることで、輸送サービスとの相乗効果があるということだ。2027年に最初の1機を、2030年までに5機の自社衛星を月周回軌道に投入予定だという。
改善タスクフォースから出された7つの提言。最も重要なのは?
これらのプロジェクトを実現するために、必要なのは失敗から学ぶこと。2025年6月6日の2度目の月着陸失敗の直接の原因は、高度を測るレーザーレンジファインダ(LRF)のハードウェアの異常だった(具体的には計測の開始が遅れたこと)。「次回は飛行実績のあるセンサーを採用する方針にした」とispace袴田武史CEOは明言。だが、課題はそれだけではない。何が足りなかったのか、民間企業として月面輸送を実現するために何が必要か、客観的に検証しようと第三者専門家による改善のための委員会(改善タスクフォース)を立ち上げた。委員はJAXAやNASA、ESAの宇宙工学専門家らで、航法誘導制御や着陸降下技術の世界的な権威などが参加。共同議長はMITのオリヴィエ L. デ・ヴェック教授と慶應義塾大学の神武直彦教授。

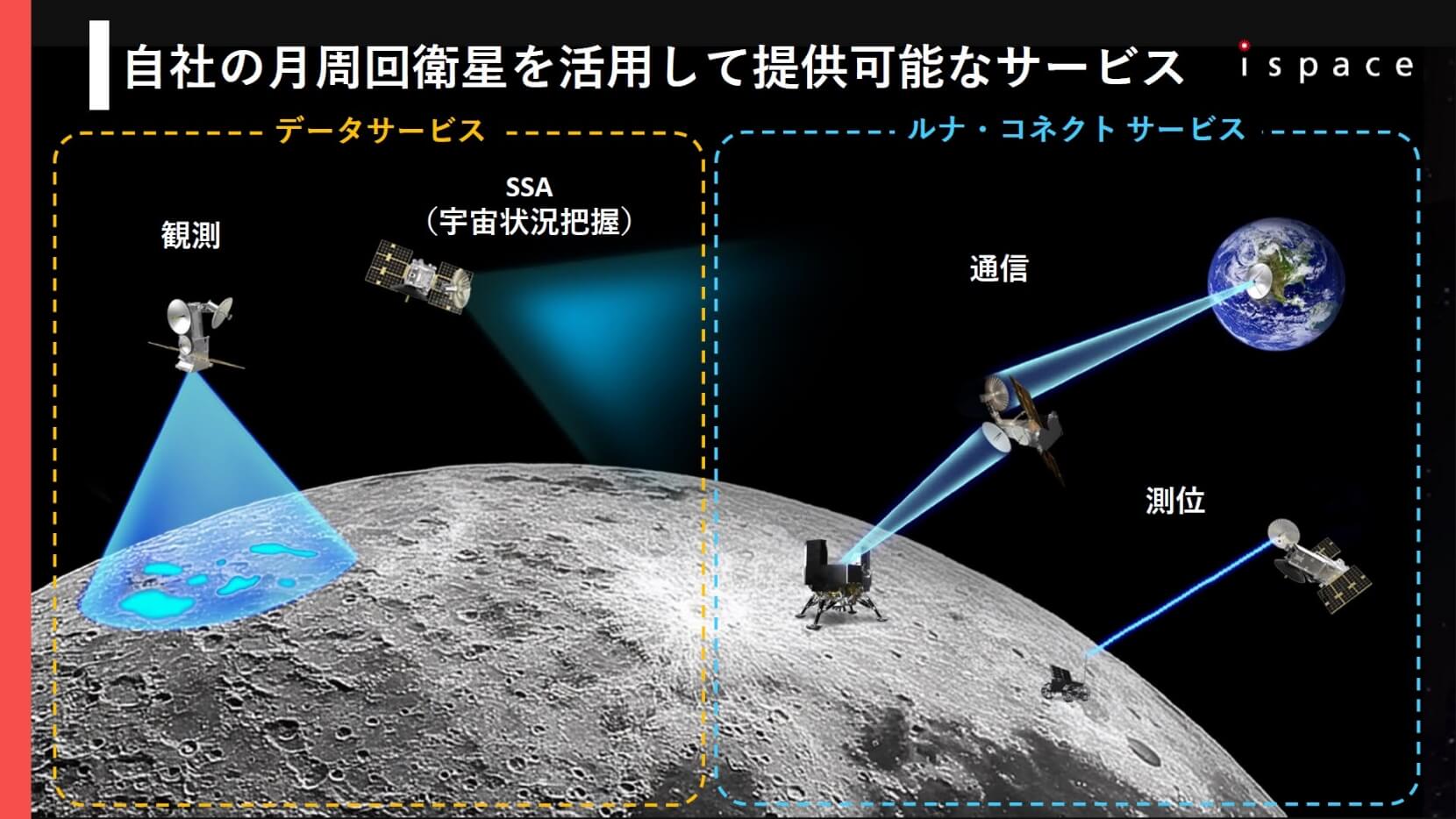
改善タスクフォースは2025年9月10日以降、100日間にわたり活動した。その結果、「ミッション2の着陸失敗の背景には、LRFのハードウェアの問題にとどまらず、システム設計やリスク管理など体系的な問題が存在することを指摘した」(神武教授)とし、7つの提言にまとめた。
運用レベル(A)は、着陸時の従来のセンサーに加えて、地形相対航法を加えること、また余った燃料を活用することという技術的な提言だ。そしてシステム開発レベル(B)では、LRFなど機器を調達する際のプロセスについて、ブラックボックスとして導入することのリスクを指摘した。特に特殊な条件下での動作限界を正しく理解するには機器についての詳細な理解と物理モデル化が不可欠であると。さらに、テストに十分なリソースを割り当てること。キーワードは「Test as you fly, Fly as you test」。テストは本番同様に行い、本番はテストのように飛行する。
デ・ヴェック教授が7つの提言の中でもっとも重要だと指摘したのが「故障検出・隔離・回復(FDIR)の設計と検証だ。同教授は語る。「2013年以降の無人月面着陸の成功率は約50パーセントに留まっている。ispaceのミッション2では航法誘導制御ソフトウェアについて単一のLRFセンサーの故障は想定していたが、冗長性のため二つ搭載していたLRF両方が同時に異常作動し性能が低下するモードは想定されていなかった」。「事前に可能な限りのトラブルやその組み合わせを想定し、どうやったらそれらを回避できるのか、設計しておくのが重要である」と。
そして経営判断レベル(c)の提言は二つ。航法誘導制御について、ispaceはアポロ宇宙船で実績をもつドレイパー研究所に外注した。それは2018年の月着陸機開発初期という時期を考慮すれば、当時のispace事業戦略上妥当な時期であったとタスクフォースは認める。だが、航法誘導制御は単なる商品ではなくシステムの一部であり、システムエンジニアリングの視点が必要になる。経営判断レベルの提言としてispaceは経験豊富な航法誘導制御エンジニアを採用するか、ドレイパー研究所がシステムエンジニアリングチームの一員として要求定義からセンサー選定、性能検証などを行うべきとした。
そして7つめの提言がリスク管理。技術チームから経営層にリスクが伝えられるとき、メッセージが薄まってしまう可能性がある。具体的には打ち上げ約半年前(2024年7月1日)の詳細設計審査の資料を確認したところ、ドレイパー研究所はLRFを高リスクな項目(レッドゾーン)として特定していた。経営陣は最重要リスクが存在する場合、打ち上げ日程を死守するのでなく、延期する可能性も含めて検討を行うべきだったとしている。
この点について氏家亮CTOに確認した。ドレイパー研究所が指摘したレッドゾーンは、長距離や高速の条件下ではLRFの性能が出ない可能性があるというものだった。それに対し試験を行って大丈夫と判断したが、(欠けていたのは)LRFの物理モデルを理解した上で大丈夫と判断できていなかったこと。物理モデルはブラックボックス化されており、ispaceに対してオープンにされていなかった。

改善タスクフォースはこれら7つの提言について、何をどこまで実行するかはispaceの判断すべきこととする。なぜならispaceはスタートアップ。コストやスケジュールの制限があり、過剰なリスク管理は事業競争力を低下させることに繋がりかねないからだ。「現実にはリスクとリターンの最適なバランスをとることが重要で、それこそがispaceが直面している宇宙民間企業のフロントランナーとしての挑戦」と神武教授は期待を込めて語った。

リスクを管理可能なものに変えていく
ispaceはこれら7つの提言を今後、実行していく。ベンダーの選定プロセスについては、重要コンポーネントのホワイトボックス化を図っていく。またドレイパー研究所に外注していた着陸誘導制御は、今後ispace自身が開発を主導、内製化を推進化していく方針だ。
袴田氏は「スタートアップにとって制約は避けて通れない。重要なのはリスクを避けることでなく、客観的な検証と学習を通じてリスクを管理可能なものへ変えていくこと」と語る。2028年のミッション3では搭載質量が格段に大きくなり、難易度も増す。改善を施したULTRAの月着陸を今度こそ見たい。

- ※
本文中における会社名、商品名は、各社の商標または登録商標です。