シミュレーションソフトウェア MELSOFT Gemini

MELSOFT Geminiの使用方法を動画で解説します。
知りたい内容を探すには?
使用方法解説動画のシナリオから動画を検索できます。
1. シナリオファイルをダウンロード2. ダウンロードしたzipファイルを解凍し、シナリオファイルを開く
3. 知りたい内容をキーワードで検索し、該当箇所のURLまたは動画タイトルをコピー
4. ブラウザにURLを入力、または本ページ内の検索ボックスに対象の動画タイトルを入力
シナリオファイルのダウンロード
-
2D平面図を作成してみよう
Geminiで作成したレイアウトを2DCADファイルに出力する方法 -

AGVが製品をピック&プレースする時の位置を変更しよう
AGVが製品を積む、降ろす時の一時停止位置を変更する方法 付属ファイル -

AGVに障害物を検出させたり、移動範囲を制限したりしてみよう
AGVに障害物を検出させる方法と、AGVの移動範囲を制限する方法 付属ファイル -

AGVの輸送を制御してみよう
ChargeOnIdleはGemini1.48以降の機能です。
AGV同士の衝突を回避する方法やAGVの状態を制御する方法
(関連動画:AGVに障害物を検出させたり、移動範囲を制限したりしてみよう、リソースとコントローラーの設定項目について知ろう(3/4)、アイドリングと充電の設定をしてみよう、自動ドアを作ってみよう(1/2)) 付属ファイル -
AGVの輸送方法を変更してみよう
AGVに輸送タスクを割り当てる時のルールと、搬入元・搬出先が複数存在する時の搬送ルールの変更方法 付属ファイル -

Crossing Conveyorを使ってみよう
4つの方向に製品を分岐できるコンベア(Crossing Conveyor)の使用方法 -

CSVファイルをプロセスに反映しよう(1/3)
パイソンスクリプト(Python)を使用して、CSVファイルのデータからコンポーネントを指定し、ディレイステートメントで待機する時間を変更する方法 付属ファイル -
CSVファイルをプロセスに反映しよう(2/3)
パイソンスクリプト(Python)を使用して、CSVファイルのデータからコンポーネントを指定し、ステートメントを追加する方法 付属ファイル -
CSVファイルをプロセスに反映しよう(3/3)
パイソンスクリプト(Python)を使用して、CSVファイルのデータからトランスポートインステートメントに製品フィルターの製品タイプを設定する方法 付属ファイル -
Geminiをインストールして操作してみよう
MELSOFT Geminiをインストールする方法と基本操作
(関連動画:インストール方法と基本操作説明) -

Gemini上のオブジェクトの見え方について学ぼう
背景色、グリッド線、レンダリングモードなどの表示設定を変更する方法 付属ファイル -

Lift Conveyorを使ってみよう
上下に動作するコンベア(Lift Conveyor)を使う方法と、複数製品をアタッチして同時に流す方法(Bundler Point、De-bundler) 付属ファイル -
VRでシミュレーション空間を体感しよう
VRで3Dシミュレーション空間で物体に触って動かす方法(DeviceController、Visual Components Experience)
VR酔いにご注意ください。
(関連動画:物理的な力や物体の影響を受ける部品のモデリングをしよう) 付属ファイル -
アイドリングと充電の設定をしてみよう
AGVの一時待機と自動充電の設定方法 付属ファイル -
アセンブリ機能を使ってみよう
アセンブリ機能を使って、シミュレーション中に製品の組立や分解をする方法 付属ファイル -
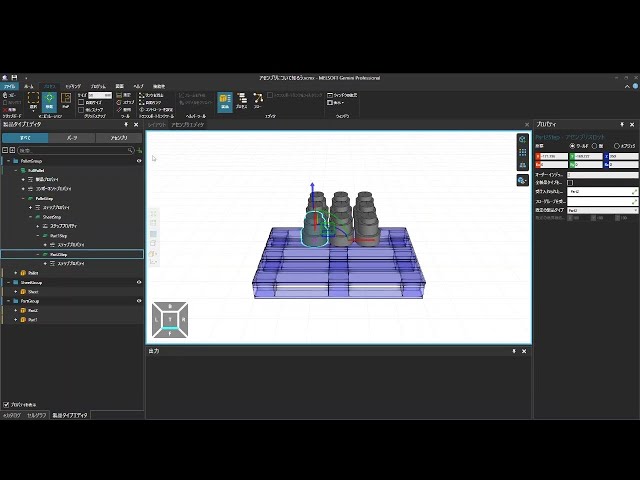
アセンブリについて知ろう
シミュレーション中に製品の組立や分解をするため、複数の製品から形成されたアセンブリ構造を設定する方法 付属ファイル -
オリジナルの台車を使って製品を輸送してみよう
オリジナルの台車を使って、製品を搬出する方法。
(アタッチステートメント、デタッチステートメント、製品ポジションフレーム、TransportLocation) 付属ファイル -

グローバルなシグナルを作ろう
グローバルなシグナルを作成し、値を確認する、または変更する方法(Signal Relay) 付属ファイル -
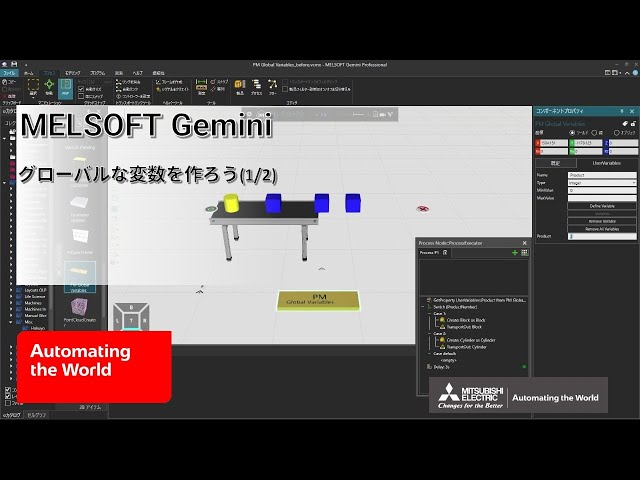
グローバルな変数を作ろう(1/2)
eカタログのモデルを使用して、グローバルな変数を作成する方法(PM Global Variables)
(関連動画:カーブするコンベアを作ってみよう、条件を満たすまで待機するプログラムを作ってみよう) 付属ファイル -
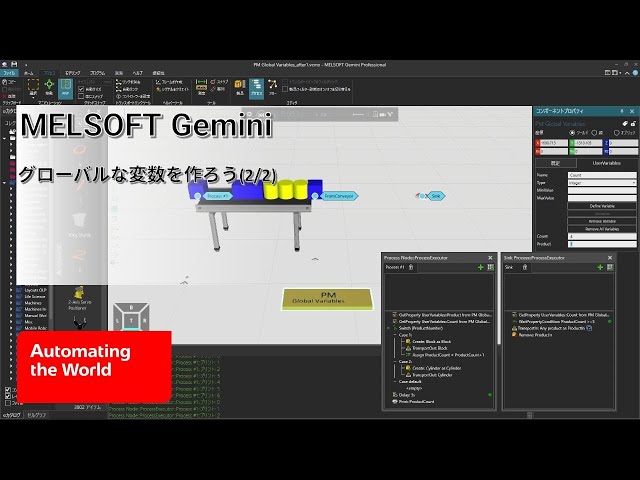
グローバルな変数を作ろう(2/2)
eカタログを用いたグローバルな変数を、プロセスから変更する方法(プロパティ取得、変数を割り当てる、プロパティコンディションを待機) 付属ファイル -

コントローラとリソースの色をそろえよう
コントローラ(Human Transport Controllerなど)とリソース(Humanなど)の色をそろえる方法(ApplyColorToResources) 付属ファイル -

コンベアの進行方向を変更しよう
進行方向の前進後退を変更できるコンベアを使用する方法(Two Way Conveyor) 付属ファイル -
コンポーネント同士を接続してみよう
ワンウェイパス、ツーウェイパス、PnPについての説明 -

コンポーネントの表示/非表示を切り替えよう
装置等のコンポーネントの表示/非表示を、プロパティやセルグラフから切り替える方法 -

サイクルタイムを測定してみよう
マシン、ロボット、作業工程のサイクルタイムを測定する方法(Cycle Time (Signals)) -

シグナルがトリガーされるまでプロセスの実行を待機させよう
シグナルが指定の値になるまでプロセスの実行を待機させる方法(シグナル待機) 付属ファイル -

シグナルを使ってコンベアを制御しよう
プロセスから、コンベアのシグナルを使用して稼働を制御する方法 付属ファイル -
シミュレーション中に製品を生成しよう(1/10)
シミュレーション中に製品を生成する、Basic Feederの使い方
注:バージョン1.410以降、Basic Feederを削除しました。eカタログの[ソースを編集]から「Version 4.8 (legacy)」を選択して利用してください。 -

シミュレーション中に製品を生成しよう(2/10)
シミュレーション中に製品を生成する、PM Flow Componentsの2種の使い方 -
シミュレーション中に製品を生成しよう(3/10)
シミュレーション中に製品を生成する、Advanced Feederの使い方 -
シミュレーション中に製品を生成しよう(4/10)
シミュレーション中に製品を生成する、Shape Feederの使い方
注:バージョン1.410以降、設定項目を変更しました。[既定]タブ-[Product]と[ComponentCreator]タブ→[ProductCreator]タブ。[ShowMessages]削除。 -
シミュレーション中に製品を生成しよう(5/10)
シミュレーション中に製品を生成する、Pattern Feederの使い方
注:バージョン1.410以降、設定項目を変更しました。[Pattern]タブ→[ProductCreator]タブ、シミュレーションを開始すると製品タイプとアセンブリを自動設定する。[ProdID]削除。[CreationInterval]→[ProductCreator]タブ-[間隔]。 -

シミュレーション中に製品を生成しよう(6/10)
シミュレーション中に製品を生成する、Feeder Pointの使い方 -
シミュレーション中に製品を生成しよう(7/10)
シミュレーション中に製品を生成する、Pallet Feederの使い方 -
シミュレーション中に製品を生成しよう(8/10)
シミュレーション中に製品を生成する、Pallet Filterの使い方 -

シミュレーション中に製品を生成しよう(9/10)
シミュレーション中に製品を生成する、Bowl Feederの使い方 -
シミュレーション中に製品を生成しよう(10/10)
シミュレーション中に製品を生成する、Signal Feederの使い方
注:バージョン1.410以降、設定項目を変更しました。合致するコンポーネントを生成する→合致した製品タイプを生成する。[PartPositioning]の初期値「Centered」→「RandomOffset]。[CreateSignalType]と[ComponentName]と[ProdID]削除。 -
シミュレーション中に統計情報を取得して表示させよう
生産数などを、統計情報のグラフに表示する方法 付属ファイル -
シミュレーション中の様子をアニメーションで録画しよう
シミュレーション結果をアニメーションとして録画し、モバイル端末で閲覧できるようにする。(Experience形式) -

シミュレーション中の様子を録画しよう
シミュレーション実行時に、ビデオにエクスポート機能を使用して、動画ファイル(avi、mp4、mov)に保存する方法(ビューエディタ、Fly Camera)
(関連動画:録画する時のカメラの視点を設定しよう、シミュレーション中の様子をアニメーションで録画しよう) 付属ファイル -
ツールを使って製品を輸送してみよう
人が台車(Pallet Jack)を使って製品を輸送する方法 付属ファイル -
デタッチを使用してデパレタイズしてみよう
アタッチして搬入した製品同士を、デタッチで分ける方法
(関連動画:トランスポートインパターンを使用してパレタイズしてみよう) 付属ファイル -

トランスポートインパターンを使用してパレタイズしてみよう
複数の製品を並べて搬入する方法と、製品同士をアタッチして1つにまとめて同時に搬出する方法
(関連動画:デタッチを使用してデパレタイズしてみよう) 付属ファイル -
トランスポートリンクツールを使用してみよう
製品のフローを設定するトランスポートリンクを一括削除、自動作成、コントローラー変更をする方法 付属ファイル -

ハンガーにワークを吊り下げて搬送しよう(1/2)
ハンガーにワークを吊り下げて搬送する方法
(Overhead Conveyorの設定、製品の在荷確認、フローの設定) 付属ファイル -

ハンガーにワークを吊り下げて搬送しよう(2/2)
ハンガーにワークを吊り下げて搬送する方法
(プロセスの設定) 付属ファイル -

ひとつのリソースが続けて作業を行うようにしてみよう
複数の作業やリソースがある場合、指定した作業をひとつのリソースが続けて行う方法(Human Transport ControllerのReserveResource、ReleaseResource) 付属ファイル -
ビューエディタを使って視点を切り替えてみよう
3Dワールド上の視点の位置を保存し、切り替える方法(関連動画:録画する時のカメラの視点を設定しよう、録画する時カメラの視点をPythonで設定しよう) -

プロセスの中からロボットを動かしてみよう
ロボット以外のプロセスから、ロボットのプログラムを実行する方法 付属ファイル -
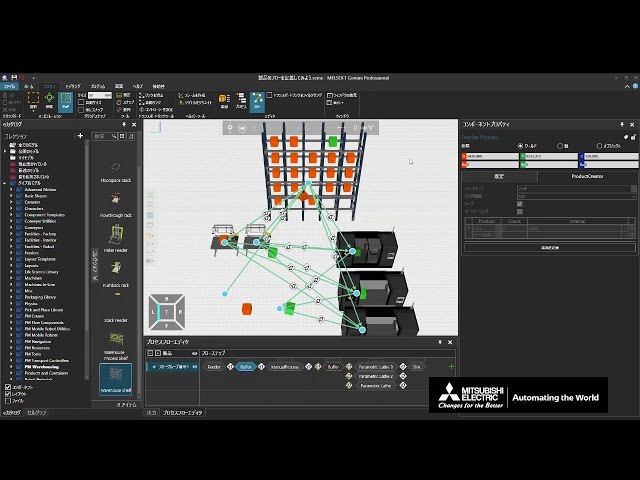
ライブラリ製品を使って倉庫をモデリングしてみよう
eカタログを組み合わせて、倉庫を作る方法
(「Warehouse Shelf」「Warehouse Process Shelf」「Floorspace Buffer」「Single Girder Crane」「Dual Rail Transport Controller」「Stack Feeder」「Pallet Feeder」。関連動画:自動倉庫を作ってみよう) 付属ファイル -

ラインシミュレーションで製品を削除しよう
ラインシミュレーション上で流れる製品を、途中で削除する方法(Sink Process、製品削除) 付属ファイル -

ランダムで不良品・故障が発生するようにしよう
ランダムで不良品や故障が発生するように設定する方法。(IFステートメント、uniform関数) 付属ファイル -

リソースが実行するタスクの順番をミッションで制御してみよう
Gemini 1.48以降の機能です。
ラインシミュレーションの実行タスクの順番をMission Controllerで制御する方法
注:バージョン1.410以降、「PM Navigation」カテゴリを「Navigation」に変更しました。 付属ファイル -

リソースとコントローラーの設定項目について知ろう(1/4)
プロセスモデリングの、人やAGV等のリソースと、制御するコントローラの設定方法(輸送や作業の優先度、リソースへのタスクの割り当て優先度、製品の収集方法、使用する道具の指定) 付属ファイル -

リソースとコントローラーの設定項目について知ろう(2/4)
プロセスモデリングの、人やAGV等のリソースと、制御するコントローラの設定方法(AGVの待機・充電場所、製品を持ったままの一時待機、製品の積み降ろしを補助する人やロボットの指定、積み降ろしの作業位置指定、装置がリソースを予約して占有) 付属ファイル -

リソースとコントローラーの設定項目について知ろう(3/4)
プロセスモデリングの、人やAGV等のリソースと、制御するコントローラの設定方法(障害物の検出・回避、移動範囲の指定、範囲内のリソースの数を制限) 付属ファイル -
リソースとコントローラーの設定項目について知ろう(4/4)
プロセスモデリングの、人やAGV等のリソースと、制御するコントローラの設定方法(回転速度や移動速度の編集、リソースの動作停止、複数個の部品を下ろす時の順番、製品の持ち方、人の姿勢の変更) 付属ファイル -
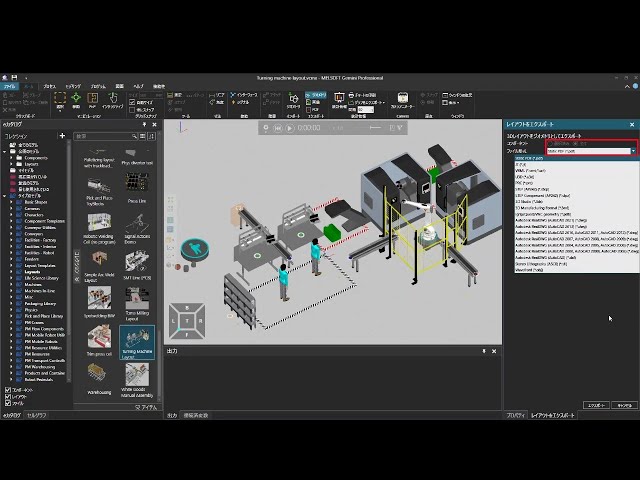
レイアウトをCADファイルで出力してみよう
Geminiで作成したレイアウトを3DCADファイルに出力する方法 -

ロボットの動作する速度を変更しよう
ラインシミュレーションでロボットの動作する速度を変更する方法(Robot Transport Controller)
(関連動画:ロボットを制御するコントローラについて知ろう) 付属ファイル -
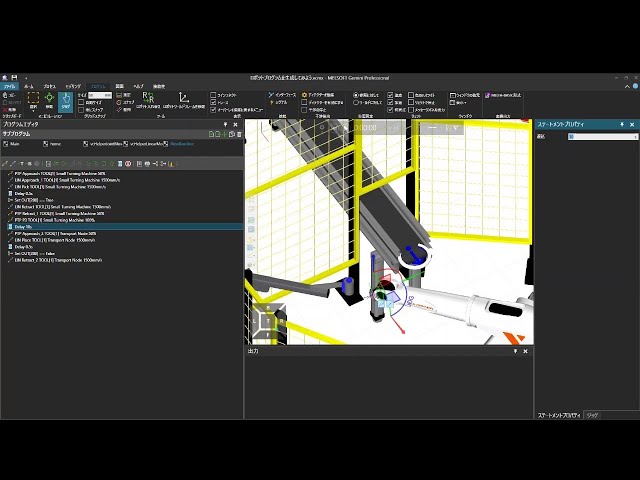
ロボットプログラムを生成してみよう
プロセスモデリングでロボットプログラムを記録し、修正し、実行する方法 付属ファイル -

ロボットを制御するコントローラーについて知ろう(1/3)
ラインシミュレーションでロボットを制御するコントローラの使用方法(ロボットのアームの挙動、スピード、開始位置への移動) 付属ファイル -

ロボットを制御するコントローラーについて知ろう(2/3)
ラインシミュレーションでロボットを制御するコントローラの使用方法(作業ステートメントの動作、グリッパーの開閉、輸送ルール) -
ロボットを制御するコントローラーについて知ろう(3/3)
ラインシミュレーションでロボットを制御するコントローラの使用方法(輸送の自動ティーチング、指定ルーチン実行、ツール設定、ピック/プレースの時間と方向) -

作業者に製品を輸送させよう
指定した場所の間で、作業者に製品を輸送させる方法 付属ファイル -

作業者の移動量・移動時間を確認しよう
作業者の移動量・移動時間を統計ダッシュボードに表示して確認する方法。 付属ファイル -

作業者の立ち位置を変更しよう(1/2)
作業場所に人、AGV、フォークリフトの新しい立ち位置を追加する方法
(関連動画:AGVが製品をピック&プレースする時の位置を変更しよう) 付属ファイル -

作業者の立ち位置を変更しよう(2/2)
フレームを作業者の立ち位置に設定する方法
(リソースポジションフレーム、ResourcePickOffset、ResourcePlaceOffset、PickApproach、PlaceApproach) 付属ファイル -
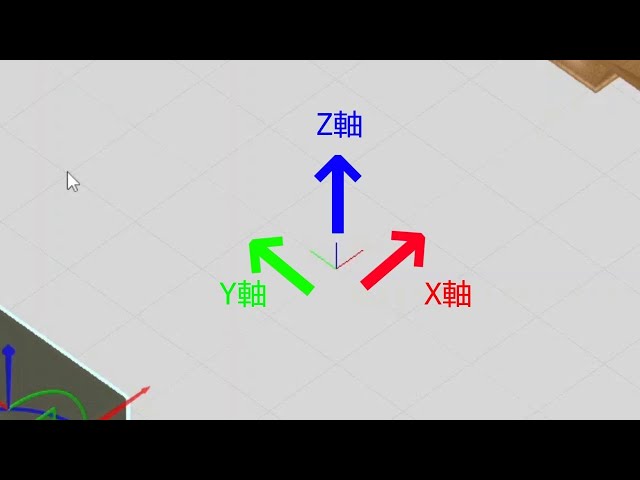
座標系について学ぼう
Geminiの3Dワールド上の座標系の解説 -
自動倉庫を作ってみよう
eカタログを組み合わせて、自動倉庫を作る方法(棚の「Warehouse Shelf」、クレーンの「Stacker Crane」、クレーンを制御する「Single Rail Transport Controller」など) -

自動ドアを作ってみよう(1/2)
人が近づくと開き、離れると閉じる、自動ドアを作る方法(Rolling Steel Door v2、Pathway Area Sensor) 付属ファイル -

自動ドアを作ってみよう(2/2)
コンベア上の製品が流れてくると開き、通り過ぎると閉じる、自動ドアを作る方法(Rolling Steel Door v2) 付属ファイル -
条件を満たすまで待機するプログラムを作ってみよう
条件を満たすまで待機する設定方法
(プロパティ取得、プロパティコンディションを待機) 付属ファイル -
処理の回数を数えよう
プロセス内で処理する回数をカウントアップする方法(ルーチン変数、変数を割り当てるステートメント、IFステートメント) 付属ファイル -
処理を繰り返そう(1/2)
条件を設定して処理を繰り返す方法(WHILE、新規変数を追加)
(関連動画:処理の回数を数えよう) 付属ファイル -

処理を繰り返そう(2/2)
繰り返し処理を制御する方法(BREAK、CONINUE) 付属ファイル -

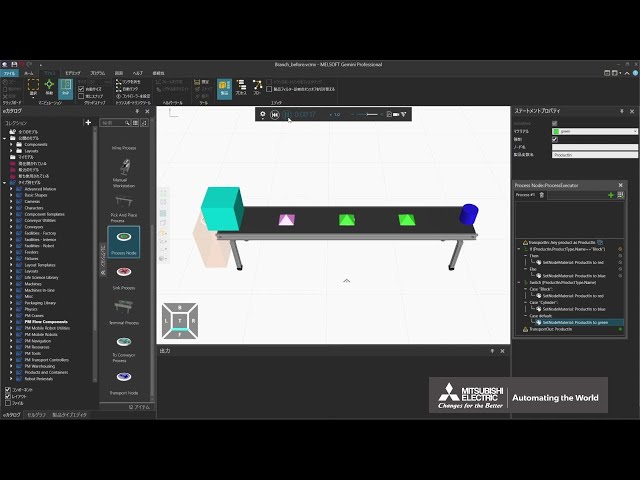
製品ごとに輸送経路を変えてみよう
製品の種類ごとに分岐コンベア上の輸送経路を変更する方法
(フローグループ、プロセスフロー、RoutingRule、トランスポートソリューションルール) 付属ファイル -
製品のフローを定義してみよう
Gemini 1.45以降の機能です。
ラインシミュレーション上の製品の流れ(フロー)を設定する方法(プロセスフローエディタ、フローステップ、トランスポートリンク、IsOptional、ProcessMode、フローステップを取得、次のフローステップを設定) 付属ファイル -
製品の情報ごとに実行する処理を変更しよう
製品の情報を取得し、実行する処理を変更する(IFステートメント、SWITCH CASEステートメント、ProductType) 付属ファイル -

輸送と作業の優先度について学ぼう
輸送タスクや作業タスクに対して優先度を設定する方法(Priority) 付属ファイル -

製品の積み降ろしを他の作業者などにさせよう
製品の積み降ろしを他の作業者などにさせる方法
例:AGVへの製品の積み降ろしを、作業者が行う 付属ファイル -

製品の輸送元と輸送先の設定を知ろう
製品を輸送する設定で使用する、リソース(人やロボット)の考え方やプロパティの説明 付属ファイル -

製品をアタッチ・デタッチしてみよう
製品同士をアタッチし、搬送後にデタッチする方法(アタッチステートメント、デタッチステートメント) 付属ファイル -

製品を変形させよう
搬送中の製品のプロパティを変更して、変形させる方法 付属ファイル -
製品搬入のタイミングを変更してみよう
製品を搬入する時に、直前の処理が完了するまで待機する方法(トランスポートイン開始、トランスポート待機) 付属ファイル -
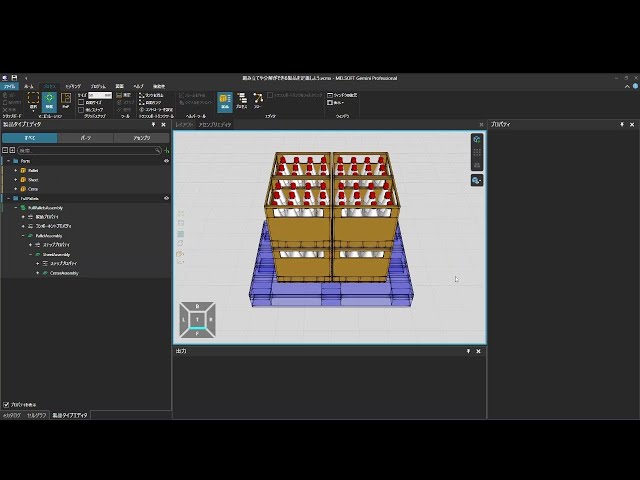
組み立てや分解ができる製品を定義しよう
製品タイプエディタでのアセンブリの設定とアセンブリエディタの使い方 付属ファイル -

天井クレーンを使ってみよう
天井クレーンで製品を搬送する方法(Dual Rail Transport Controller、Crane) 付属ファイル -
統計ダッシュボードのテンプレートチャートを使ってみよう
統計情報のテンプレートチャートの使い方と、オリジナルのテンプレートチャートとレイアウトを作成する方法 付属ファイル -

統計情報を3Dワールド上に表示させてみよう
装置の稼働状態や生産数などを、3Dワールド上でビーコンやテキストなどに表示する方法 付属ファイル -
統計情報を表示してみよう
装置の稼働状態や生産数などを、統計情報のグラフに表示する方法
タイムチャートの表示方法 付属ファイル -

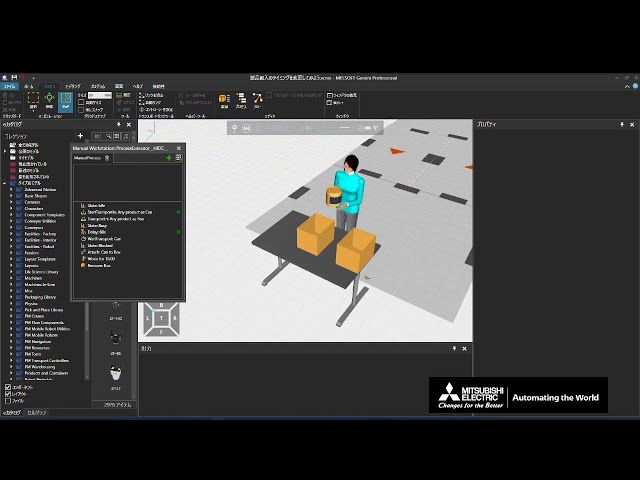
机が満杯の場合、別の机に搬送しよう
机が満杯の時、別の机に置き、空きができた時、机の空いた場所に製品を搬入する方法 付属ファイル -
品種に応じて動作を変えよう
部品の種類に応じて、搬送先や動作を変える方法 付属ファイル -
複数のAGVを待機時間無しで動作させよう
複数のAGVを待機時間無しで動作させる方法
(関連動画:製品の輸送元と輸送先の設定を知ろう) 付属ファイル -
複数の作業者が動作するタイミングを合わせよう(1/4)
複数の作業者が一緒に1つの製品を搬送しているような見た目を表現するため、メインの製品と一緒にダミーの製品を搬送させる方法 付属ファイル -
複数の作業者が動作するタイミングを合わせよう(2/4)
複数の作業者が一緒に1つの製品を搬送しているような見た目を表現するため、製品を搬入完了するタイミングを合わせる方法 付属ファイル -

複数の作業者が動作するタイミングを合わせよう(3/4)
複数の作業者が一緒に1つの製品を搬送しているような見た目を表現するため、製品を搬出開始するタイミングを合わせる方法 付属ファイル -

複数の作業者が動作するタイミングを合わせよう(4/4)
複数の作業者が一緒に1つの製品を搬送しているような見た目を表現するため、他の作業を割り込ませない方法 付属ファイル -

複数のコンポーネントを1つにまとめよう
アタッチ機能を使用して、複数のコンポーネントを1つにまとめて、同時に操作する方法 付属ファイル -

複数のコンポーネントを連動して動作させよう
ロボットや装置など、複数のコンポーネントを連動して動作させる方法 付属ファイル -
複数のパーツを使用して製品を組み立てよう
プロセスモデリングでのアセンブリを組み立てる設定方法
(アセンブリを取得、アセンブリプロパティを取得) 付属ファイル -

録画する時のカメラの視点を設定しよう
録画する時のカメラの視点をカメラアニメーターで設定する方法(関連動画:録画する時のカメラの視点をPythonで設定しよう) 付属ファイル -
輸送する製品を制限してみよう
Gemini 1.48以降の機能です。
ラインシミュレーションで搬送する製品の種類を製品フィルター機能で制限する方法 付属ファイル -

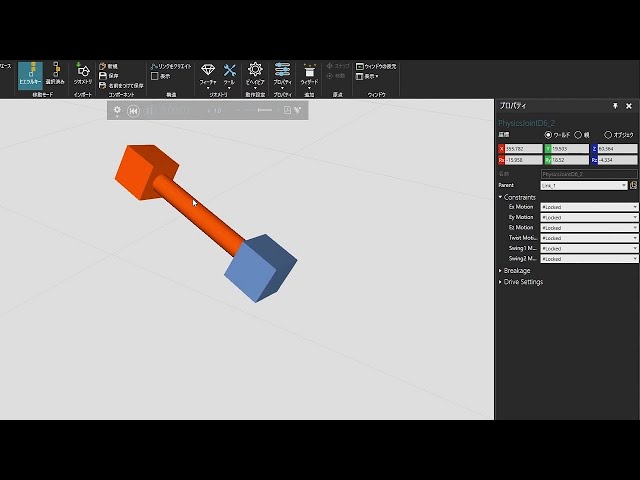
2軸回転ポジショナを作成し、ロボットと接続しよう(1/2)
オリジナルの2軸回転ポジショナを作る方法(3DCADファイルをインポート、可動部を分割) 付属ファイル -

2軸回転ポジショナを作成し、ロボットと接続しよう(2/2)
オリジナルの2軸回転ポジショナを作る方法と、ロボットと接続する方法(ウィザードのポジショナ、ロボットのCompactPositionerAssembly設定) 付属ファイル -
3DCADの機構情報を引き継いでみよう
3DCADファイルの機構情報を引き継いでインポートする方法 付属ファイル -
3DCADモデルを簡素化しよう
インポートした3DCADを簡素化し、システムの負荷を減らす方法
注:バージョン1.410以降のフォルダは「ドキュメント\MITSUBISHI\Gemini\●.●●●\My Commands\Python 2\」です。
(関連動画:シミュレーション性能を最適化しよう) 付属ファイル -
AGVを作ってみよう(1/12)
オリジナルのAGVを作成して、基本の設定をする方法 付属ファイル -
AGVを作ってみよう(2/12)
オリジナルのAGVの経路を可視化する方法 付属ファイル -
AGVを作ってみよう(3/12)
オリジナルのAGVを動かす方法 付属ファイル -
AGVを作ってみよう(4/12)
オリジナルのAGVの走行経路を補間する方法 付属ファイル -

AGVを作ってみよう(5/12)
オリジナルのAGVの情報を読取って動作を制御する方法 付属ファイル -

AGVを作ってみよう(6/12)
オリジナルのAGVを回転させる方法 付属ファイル -

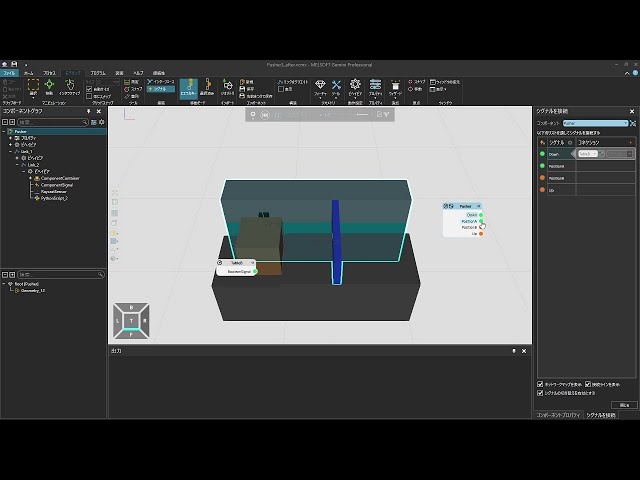
B接点センサーを作ろう
B接点センサーを作成する方法(レイキャストセンサー、PythonScriptでセンサーシグナルの値の反転)
(関連動画:レイキャストセンサーを使ってみよう、ボリュームセンサーを使ってみよう、センサーを作ってみよう) 付属ファイル -

CSVファイルを読み書きしよう(1/2)
パイソンスクリプト(Python)のスニペットを使用して、CSVファイルの読み込みや書き込みをする方法(open、reader、writer) 付属ファイル -

CSVファイルを読み書きしよう(2/2)
パイソンスクリプト(Python)を使用して、読み込んだCSVファイルをシミュレーションに反映する方法と、シミュレーション結果をCSVファイルに書き込む方法(open、reader、writer) 付属ファイル -

eカタログにオリジナルモデルを登録しよう
eカタログにオリジナルの装置やレイアウトのモデルを登録する方法
関連動画:コンポーネントを保存しよう 付属ファイル -
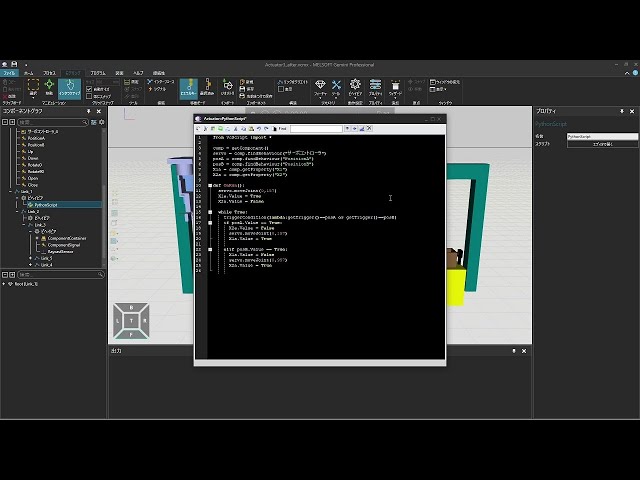
IOコントロールウィザードを使用してリフトを作ってみよう(1/2)
オリジナルのリフト装置を作成する方法
(3DCADファイルをインポート、機構付け) 付属ファイル -
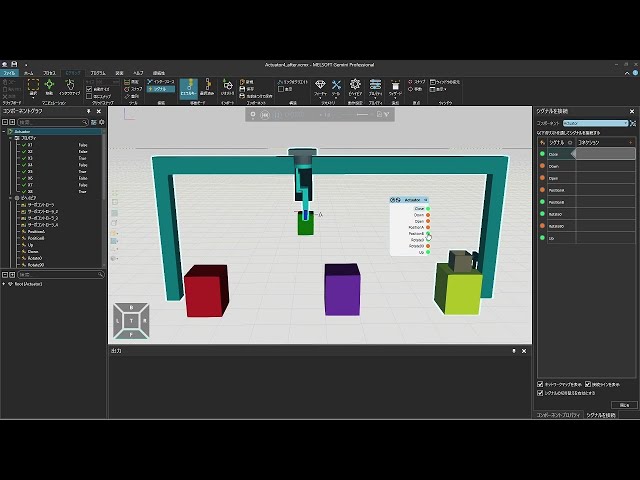
IOコントロールウィザードを使用してリフトを作ってみよう(2/2)
オリジナルのリフトを作成する方法
(ウィザードのIOコントロール、シグナル制御) 付属ファイル -
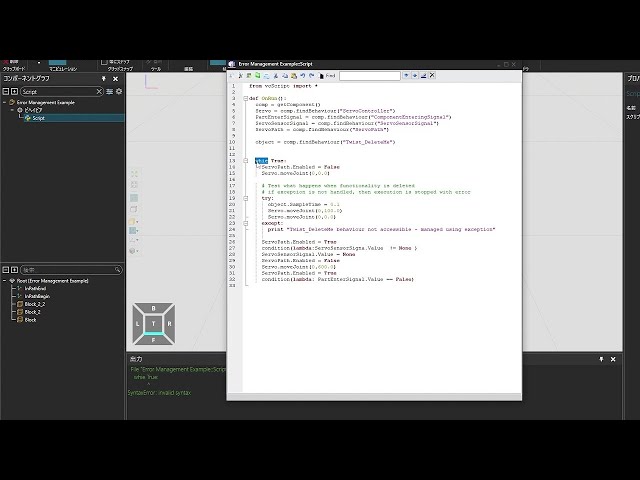
Pythonのエラーを解決しよう
パイソンスクリプト(Python)を使用した際に発生するエラー(コンパイルエラー、実行時エラー)や例外を解決する方法 付属ファイル -

Pythonのスニペットを作成しよう
Pythonスクリプトの再利用可能なコードを作成する方法 -
アクチュエータを作ってみよう(1/6)
オリジナルのアクチュエータの3DCADファイルをインポートして、可動部を1つ設定する方法
付属ファイル -

アクチュエータを作ってみよう(2/6)
オリジナルのアクチュエータの、可動部を複数設定する方法
付属ファイル -

アクチュエータを作ってみよう(3/6)
オリジナルのアクチュエータの、ワークを検出する方法と、ワークを格納するコンテナの設定方法
付属ファイル -
アクチュエータを作ってみよう(4/6)
オリジナルのアクチュエータの可動部の動作を、パイソンスクリプト(Python)で制御する方法
付属ファイル -
アクチュエータを作ってみよう(5/6)
オリジナルのアクチュエータのワーク搬送を、パイソンスクリプト(Python)で制御する方法 付属ファイル -
アクチュエータを作ってみよう(6/6)
オリジナルのアクチュエータでワーク同士を結合する動作を、パイソンスクリプト(Python)で制御する方法 付属ファイル -
ウィザードを使ってみよう
オリジナルの装置の動作設定を自動生成する方法
注:バージョンアップにより変更しました。[ワークライブラリ]削除。[変換]→[直進]。[変換フォロワー]→[直進フォロワー]。バージョン1.410以降、「PM Flow Components」カテゴリを「Flow Components」に変更しました。 付属ファイル -
ウィザードを使ってコンベアを作ってみよう
ウィザードを使ってオリジナルのコンベアを作る方法 付属ファイル -
オリジナルのリニアトラックを作ってみよう(1/2)
オリジナルのリニアトラックを作成し、台車をリニアトラックに沿って動作可能にする方法 付属ファイル -
オリジナルのリニアトラックを作ってみよう(2/2)
オリジナルのリニアトラックを作成し、ロボットプログラムを使用して、ロボットをリニアトラックに沿って動かす方法 付属ファイル -
カーブするコンベアを作ってみよう
オリジナルのカーブするコンベアを作る方法 付属ファイル -
カム機構を作ってみよう(1/2)
オリジナルのカム機構を持つ装置を作成する方法
(3DCADファイルをインポート、可動部を分割) 付属ファイル -
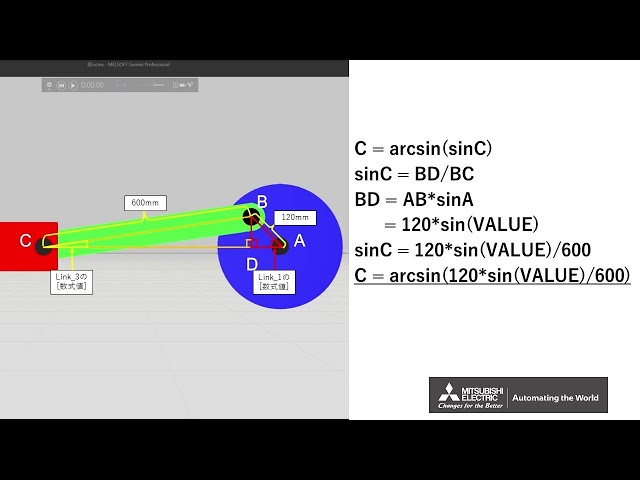
カム機構を作ってみよう(2/2)
オリジナルのカム機構を持つ装置を作成する方法
(機構付け、可動部の運動量を三角関数で計算) 付属ファイル -
グラフのデータの色を変更しよう
Pythonスクリプトを使用して、統計情報のダッシュボードに表示されるグラフのデータの色を変更する方法。(Dashboard、Tabs、Charts、Series、Colors、RGBの指定) 付属ファイル -
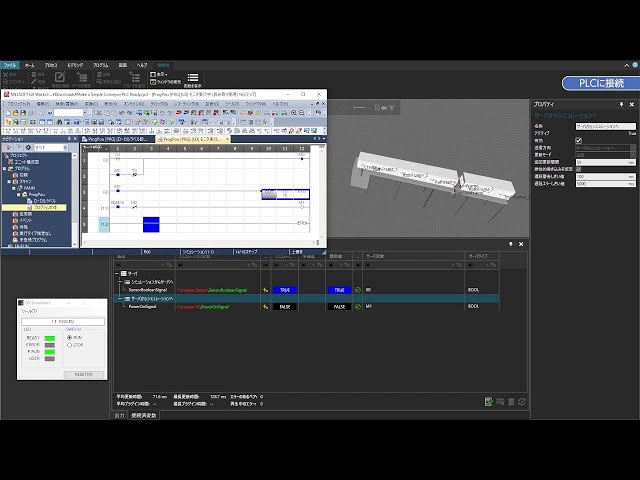
コンベアを作ってシーケンサと繋いでみよう
オリジナルのコンベアを作って、シーケンサと連携してシミュレーションする方法 付属ファイル -

コンポーネントが衝突するときの反発を定義しよう
物理的なコンポーネントの反発や弾性を定義する方法 付属ファイル -
コンポーネントのノードを選択して設定を確認しよう
オリジナルの装置などのコンポーネントを作成する時にノード/リンクを選択する方法 -
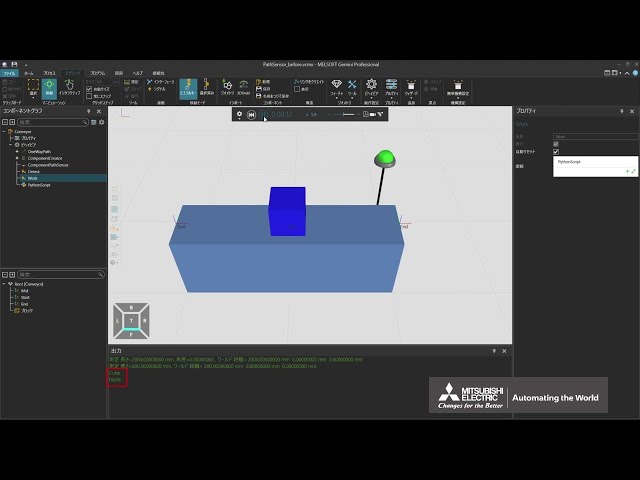
コンポーネントパスセンサーを使ってみよう
コンベア上を移動する製品のみを検出するコンポーネントパスセンサーを使用する方法
(関連動画:レイキャストセンサーを使ってみよう、ボリュームセンサーを使ってみよう、ウィザードを使ってコンベアを作ってみよう、ツーウェイパスを使ってみよう) 付属ファイル -

コンポーネントを保存しよう
Geminiで作成したコンポーネント(装置やワークなど)を保存して、オリジナルのeカタログに設定する方法 -
サーボをPythonで制御しよう(1/2)
オリジナルの装置の駆動を、パイソンスクリプト(Python)で制御する方法。(setJointTarget、CalcMotionTime、setMotionTime、move、moveJoint、moveImmediate) 付属ファイル -

サーボをPythonで制御しよう(2/2)
オリジナルの装置の駆動を、パイソンスクリプト(Python)で制御する方法で、駆動の状態に応じて動作を変更する。(OnHeartbeat) 付属ファイル -
シミュレーション性能を最適化しよう
レイアウトを作成する上で、シミュレーション性能を上げたい場合に注意すべき点や、役に立つ機能の紹介。 付属ファイル -
シミュレーション中に製品を追加してみよう(1/3)
シミュレーション中にコンポーネントを作成できる基本的なフィーダー(Feeder)をモデル化する方法
注:バージョンアップによりメニュー名を変更しました。[ボックス]→[ブロック]。[コンテナ]→[コンポーネントコンテナ]。 付属ファイル -
シリンダーを作ってみよう(1/3)
オリジナルのシリンダーを作成する方法
(3DCADファイルをインポート、機構付け) 付属ファイル -
シリンダーを作ってみよう(2/3)
オリジナルのシリンダーを作成する方法
(ウィザードのアクションスクリプト、つかむ検出範囲、リリース距離、動作のプログラム) 付属ファイル -
シリンダーを作ってみよう(3/3)
オリジナルのシリンダーを作成する方法
(動作のプログラムを制御するPythonスクリプト) 付属ファイル -

センサーを作ってみよう
オリジナルのセンサーを作る方法 付属ファイル -

ターンコンベアを作ってみよう
オリジナルのターンコンベアを作る方法 付属ファイル -
チャックを作ってみよう(1/3)
ワークをテーブルからテーブルへ搬送する、オリジナルのチャックの3DCADファイルをインポートして、可動部を設定する方法 付属ファイル -
チャックを作ってみよう(2/3)
オリジナルのチャックの、ワークを検出する方法と、ワークを格納するコンテナの設定方法 付属ファイル -
チャックを作ってみよう(3/3)
オリジナルのチャックのワーク搬送を、パイソンスクリプト(Python)で制御する方法 付属ファイル -
ツーウェイパスを使ってみよう
オリジナルの装置やコンベアの上を、製品が前後の双方向に流れる設定方法 付属ファイル -
フィーダーを作って構造を理解してみよう
オリジナルのフィーダーを作って、機構の設定方法を理解する
注:バージョン1.410以降、「PM Flow Components」カテゴリを「Flow Components」に変更しました。 付属ファイル -
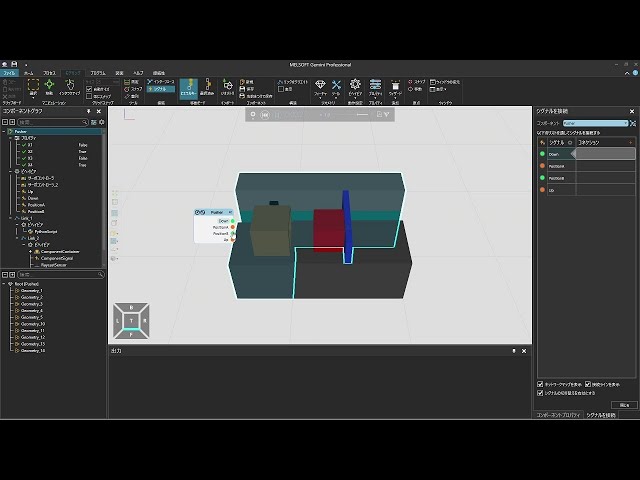
プッシャーで複数のワークを同時に押し出してみよう(1/3)
複数のワークを同時に押し出せる、オリジナルのプッシャーを作る方法(3DCADファイルをインポート、可動部を分割、機構付け) 付属ファイル -
プッシャーで複数のワークを同時に押し出してみよう(2/3)
複数のワークを同時に押し出せる、オリジナルのプッシャーを作る方法(ワークを検出する干渉ディテクター、格納するコンテナ) 付属ファイル -
プッシャーで複数のワークを同時に押し出してみよう(3/3)
複数のワークを同時に押し出せる、オリジナルのプッシャーを作る方法(干渉検出したワークを押し出すパイソンスクリプト(Python)) 付属ファイル -
プッシャーを作ってみよう(1/4)
製品を押し出せる、プッシャーの可動部の機構設定方法 付属ファイル -
プッシャーを作ってみよう(2/4)
プッシャーが製品を検知するセンサーの設定方法 付属ファイル -
プッシャーを作ってみよう(3/4)
プッシャーで製品を押し出すパイソンスクリプト(Python)の設定方法 付属ファイル -
プッシャーを作ってみよう(4/4)
プッシャーが押し出した製品同士を結合する方法 付属ファイル -
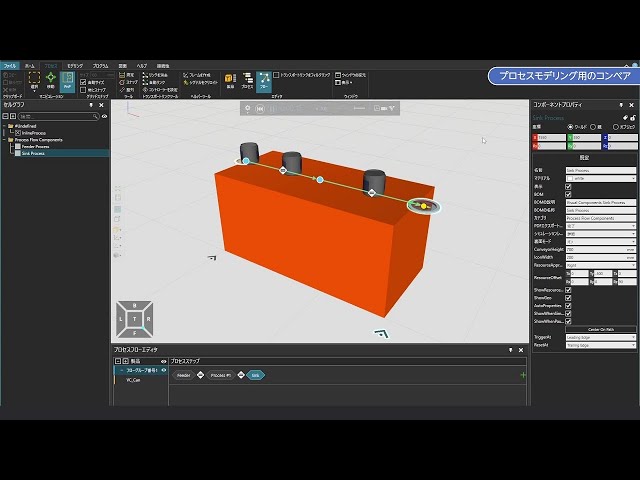
プロセスモデリング用コンベアを作ってみよう
オリジナルのプロセスモデリング用コンベアを作る方法
注:バージョンアップによりメニュー名を変更しました。[コンテナ]→[コンポーネントコンテナ]。 付属ファイル -
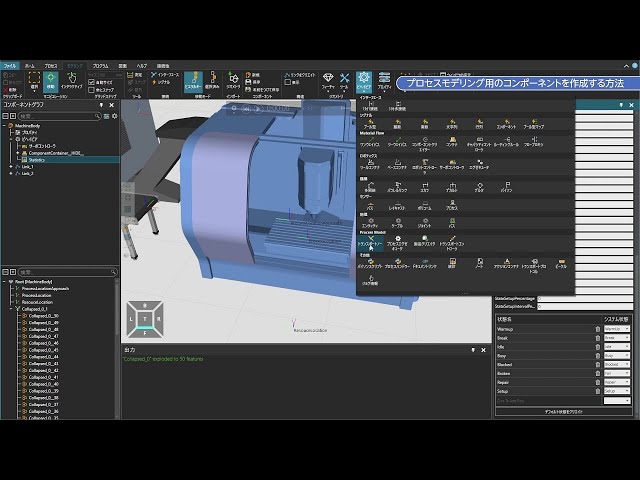
プロセスモデリング用のコンポーネントを作ってみよう
オリジナルの装置を作成して、プロセスモデリングで使用可能にする設定方法
注:バージョンアップによりメニュー名を変更しました。[変換]→[直進]。 付属ファイル -

プロパティに入力規則を設定しよう
パイソンスクリプト(Python)を使用して、値の範囲などの制約付きのプロパティを作成する方法 -

プロパティの数量と単位を定義しよう
パイソンスクリプト(Python)を使用して、数量と単位を指定できるプロパティを作成する方法 付属ファイル -

プロパティのボタンをクリックした時の動作を設定しよう
コンポーネントプロパティのボタンをパイソンスクリプト(Python)で動的に作成する方法、そのボタンをクリックした時の動作をパイソンスクリプトで設定する方法 付属ファイル -
プロパティやシグナルの変化時にPythonを実行しよう
プロパティやシグナルの値の変化などのイベントが発生した時に、パイソンスクリプト(Python)を実行する方法 付属ファイル -
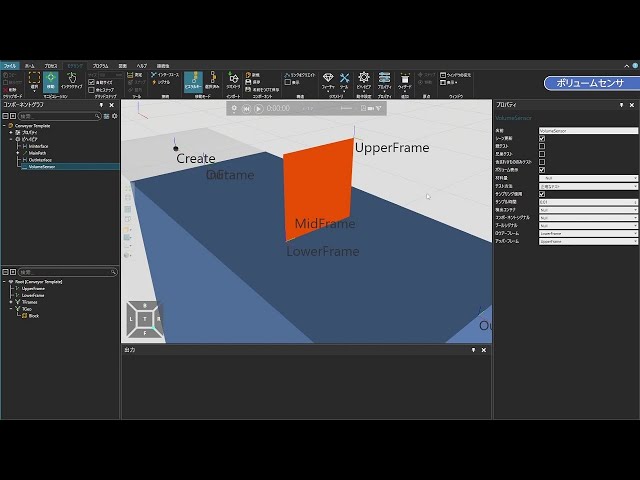
ボリュームセンサを使ってみよう
人感センサー等を表現(空間中の部品を検出する面を設定)する方法 付属ファイル -
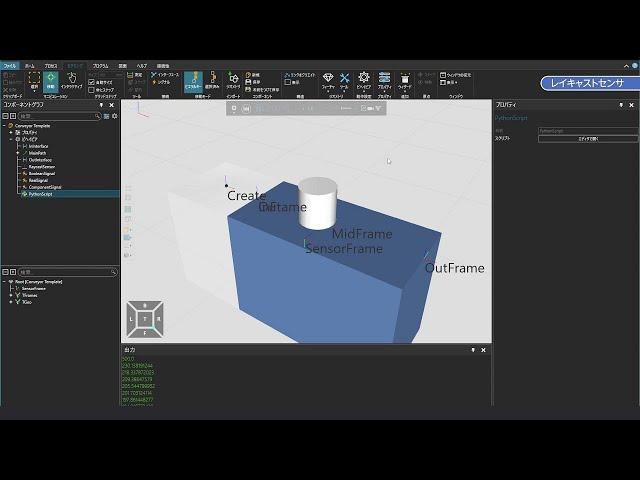
レイキャストセンサを使ってみよう
光学センサやレーザセンサ等を表現する方法 付属ファイル -
ロボットツールを作って、製品を搬送しよう(1/2)
オリジナルのロボットツールを作成する方法(3DCADファイルをインポート、機構付け、動作設定) 付属ファイル -

ロボットツールを作って、製品を搬送しよう(2/2)
オリジナルのロボットツールを作成する方法
(ロボットツールとロボットの接続、ロボットツールで製品を掴む、搬送する、離す) 付属ファイル -
ロボットツールを作って、PLCでロボットを制御して製品を搬送しよう(1/3)
オリジナルのロボットツールを作成する方法
(3DCADファイルをインポート、機構付け、動作設定、ロボットツールとロボットの接続) 付属ファイル -
ロボットツールを作って、PLCでロボットを制御して製品を搬送しよう(2/3)
オリジナルのロボットツールを作成する方法
(ロボットのティーチング) 付属ファイル -
ロボットツールを作って、PLCでロボットを制御して製品を搬送しよう(3/3)
オリジナルのロボットツールを作成する方法
(ロボットツールで製品を掴む、搬送する、離す、PLCで制御する) 付属ファイル -
ロボットをPythonで制御しよう(1/3)
ロボットをパイソンスクリプト(Python)を用いて制御して、ルーチンの実行やティーチングを行う方法 付属ファイル -
ロボットをPythonで制御しよう(2/3)
ロボットをパイソンスクリプト(Python)を用いて制御して、センサーと連携してワークを位置の把握・つかむ・運ぶ・リリースする方法 付属ファイル -
ロボットをPythonで制御しよう(3/3)
ロボットをパイソンスクリプト(Python)を用いて制御して、自動生成したティーチングをルーチンに記録する方法と、ワークを複数並べる方法 付属ファイル -
ワークの色を一部分のみ変更しよう
パイソンスクリプト(Python)を使用して、ワークの色を一部分のみ変更する方法
(関連動画:製品をハイライトして強調しよう、レイキャストセンサを使ってみよう) 付属ファイル -

加工前と加工後で製品を置き換えてみよう
パイソンスクリプト(Python)を使用して、装置が加工した後に製品を別のコンポーネントに置き換える方法 付属ファイル -

可動部を斜めに動かそう
装置の可動部に、斜めの軸を設定し、直線、または回転運動の基準とする方法(移動モード、カスタム、Joint、Pivot、Pos、WPR) 付属ファイル -

減衰を使ってみよう(1/3)
物理の線形減衰と傾斜減衰を使用して、振動時の挙動を設定する方法 付属ファイル -
減衰を使ってみよう(2/3)
物理の反復法ソルバーで位置反復と速度反復を使用して、振動時の挙動を設定する方法 付属ファイル -
減衰を使ってみよう(3/3)
装置の一部に減衰を使用して、部品が衝突した時の挙動を設定する方法 付属ファイル -

材料の密度を変更しよう
材料の密度を変更して、物体の質量に影響を与える方法 付属ファイル -

参照型とリスト型のプロパティを作成しよう
パイソンスクリプト(Python)を使用して、コンポーネントのノードを参照できるプロパティと、リスト型のプロパティを作成する方法 付属ファイル -
出力ウィンドウのメッセージを削除や保存しよう
パイソンスクリプト(Python)を使用して[出力]ウィンドウのメッセージをクリアや保存する方法 -
水平方向の機構を持ったロボットを作ってみよう
オリジナルの、水平方向の機構を持った、単純な線形ロボットを作る方法 付属ファイル -
正規分布を使用して疑似乱数を作ってみよう
分布プロパティを作成し、正規分布を使用して疑似乱数を作る方法
パイソンスクリプト(Python)を使用してシード値を変更する方法 -

製品に穴をあけよう(1/5)
製品に穴をあける加工機の機構を設定する方法 付属ファイル -
製品に穴をあけよう(2/5)
シグナルで加工機の可動部を制御する方法 付属ファイル -

製品に穴をあけよう(3/5)
プロパティで、製品の見た目を制御する方法(トランスフォーム、再構築、条件演算子)
(関連動画:製品の合体や型抜きをしてみよう) 付属ファイル -

製品に穴をあけよう(4/5)
製品を生成し、指定した経路を移動させる方法(コンポーネントクリエイター、コンポーネントコンテナ、ワンウェイパス) 付属ファイル -

製品に穴をあけよう(5/5)
可動部の現在値に合わせて、製品の穴の深さを制御する方法 付属ファイル -
製品に溝を掘ろう(1/3)
加工機と製品のCADファイルをインポートし、溝を掘る加工機の機構を設定する方法 付属ファイル -

製品に溝を掘ろう(2/3)
パイソンスクリプト(Python)を使用して、シグナルで加工機の可動部を制御する方法 付属ファイル -

製品に溝を掘ろう(3/3)
パイソンスクリプト(Python)を使用して、加工機で製品に溝を掘る方法
(関連動画:製品の合体や型抜きをしてみよう、センサーを作ってみよう) 付属ファイル -
製品の合体や型抜きをしてみよう
ブール型演算処理を使用して、製品の合体や型抜きをする方法 付属ファイル -
製品の素材によってコンベアのルートを変更しよう(1/3)
分岐があるコンベアに、RoutingRule機能を設定して、製品のプロパティの値によってルートを変更する方法 付属ファイル -

製品の素材によってコンベアのルートを変更しよう(2/3)
分岐があるコンベアに、パイソンスクリプト(Python)を追加して、製品のマテリアル(素材)を確認する方法と、ルートを変更する方法 付属ファイル -
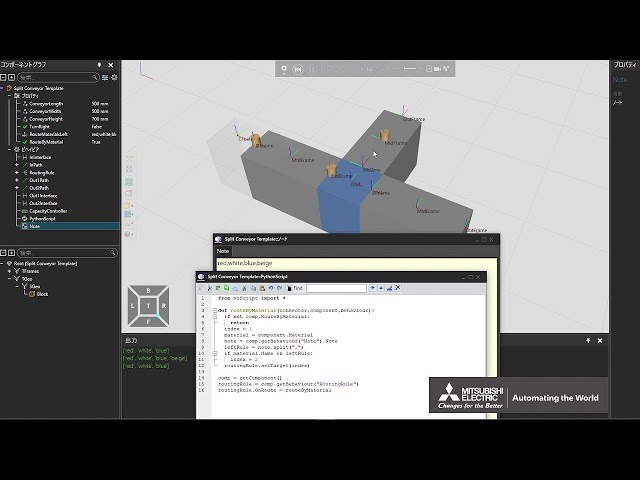
製品の素材によってコンベアのルートを変更しよう(3/3)
分岐があるコンベアに、パイソンスクリプト(Python)を追加して、プロパティやノートでルート変更ルールを編集する方法 付属ファイル -
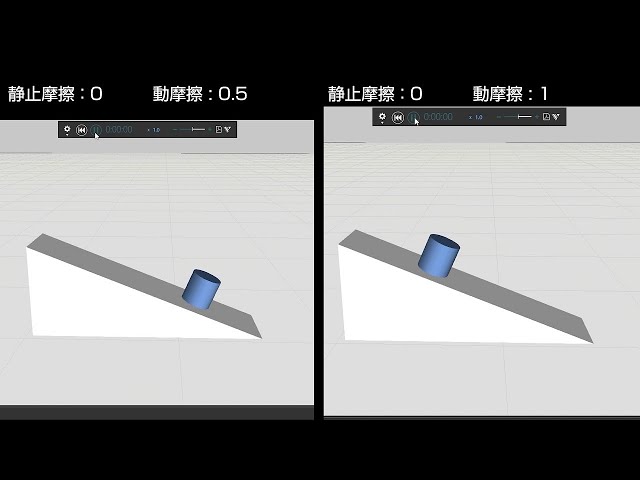
製品の摩擦を変更しよう(1/2)
物理の影響を受ける製品の、静止摩擦、動摩擦の摩擦力の設定方法 付属ファイル -
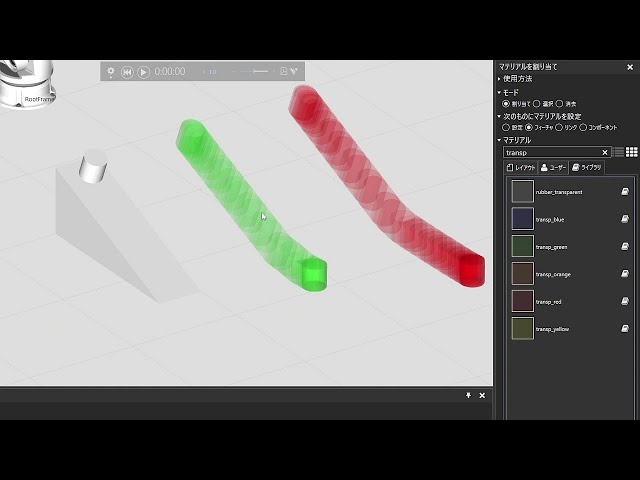
製品の摩擦を変更しよう(2/2)
物理の影響を受ける製品の摩擦力を変更した時の、軌跡を保存する方法 付属ファイル -
製品をハイライトして強調しよう
製品をハイライトにするなどの色の変更をして、強調して表示する方法 付属ファイル -

操作盤を作ってみよう(1/3)
オリジナルの操作盤を作る方法(3DCADファイルをインポート、動的に表示を切り替え可能にする) 付属ファイル -
操作盤を作ってみよう(2/3)
オリジナルの操作盤を作る方法(可動部を分割、押下可能にする) 付属ファイル -

操作盤を作ってみよう(3/3)
オリジナルの操作盤を作る方法(押下時にシグナルを制御するPythonスクリプト) 付属ファイル -
装置が製品を搬送するタイミングを制御してみよう
装置が製品を搬送するタイミングを、パイソンスクリプト(Python)を使用して、センサー、シグナル、条件分岐で制御する方法 付属ファイル -

装置シミュレーションでワークを削除しよう
シミュレーション中に生成した製品を途中で削除する方法(Product Bin (Physics)、パイソンスクリプト(Python)) 付属ファイル -
装置シミュレーション用コンベアを作ってみよう(1/3)
フィーダーを使わずに、複数種類のワークを生成する方法 付属ファイル -
装置シミュレーション用コンベアを作ってみよう(2/3)
コンベア上の製品の挙動(前進、後退、一時停止など)を制御する方法 付属ファイル -
装置シミュレーション用コンベアを作ってみよう(3/3)
コンベア上の製品が流れる先のルート分岐を制御する方法 付属ファイル -

装置の表示状態を制御しよう
パイソンスクリプト(Python)を使用して、装置の一部を非表示にする方法
関連動画:コンポーネントの表示/非表示を切り替えよう 付属ファイル -
統計情報のダッシュボードを作成しよう(1/2)
パイソンスクリプト(Python)を使用して、統計情報のダッシュボードに、オリジナルの行数・列数のレイアウトを追加する方法
関連動画:統計情報を表示してみよう 付属ファイル -

統計情報のダッシュボードを作成しよう(2/2)
アドオンを使用して、統計情報のダッシュボードに、オリジナルの行数・列数のレイアウトを追加する方法
関連動画:統計ダッシュボードのテンプレートチャートを使ってみよう 付属ファイル -
複数の3DCADデータを組み合わせてみよう
複数の3DCAD ファイルをインポートして組み合わせる方法、または、置き換え・着せ替えする方法 付属ファイル -
複数のジオメトリを切り替えてみよう
オリジナルの箱の見た目を、条件によって切り替え可能にする方法 付属ファイル -
複数のワークを繋げて、物理演算で動かしてみよう
物理設定されたコンポーネント同士を固定し、お互いに物理的に干渉しあうように設定する方法 付属ファイル -
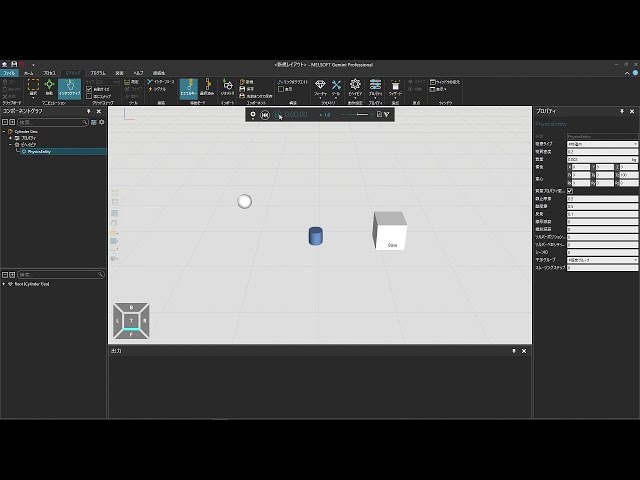
物理的な力や物体の影響を受ける部品のモデリングをしよう
物理的な力や物体の影響を受ける部品を作成する方法 -

物理の影響を受けるコンテナを作成しよう
物理の影響を受けてワークが落下する、コンテナ(棚や箱)を作成する方法 付属ファイル -
物理の影響を受けるコンベアを作成しよう(1/2)
部品が端で落下するコンベアの設定方法 付属ファイル -
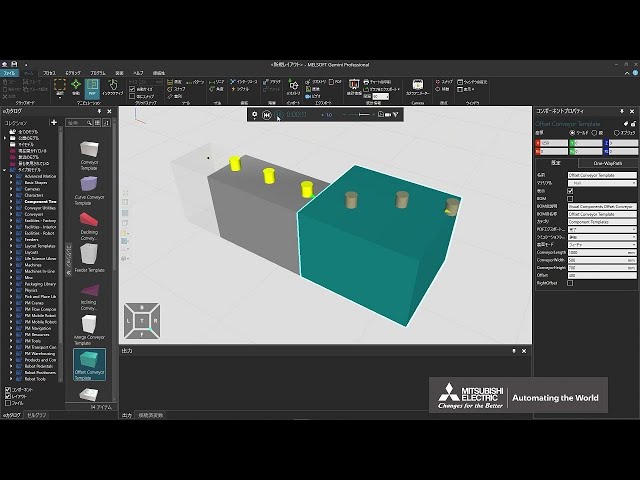
物理の影響を受けるコンベアを作成しよう(2/2)
部品が物理の影響を受けながら斜面を流れるコンベアの設定方法 付属ファイル -
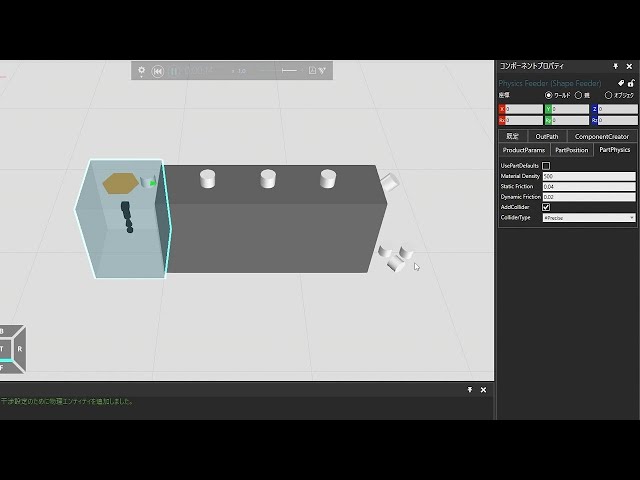
物理の影響を受けるフィーダーを作成しよう(1/2)
物理的な力や物体の影響を受けるフィーダーを作成する方法 付属ファイル -
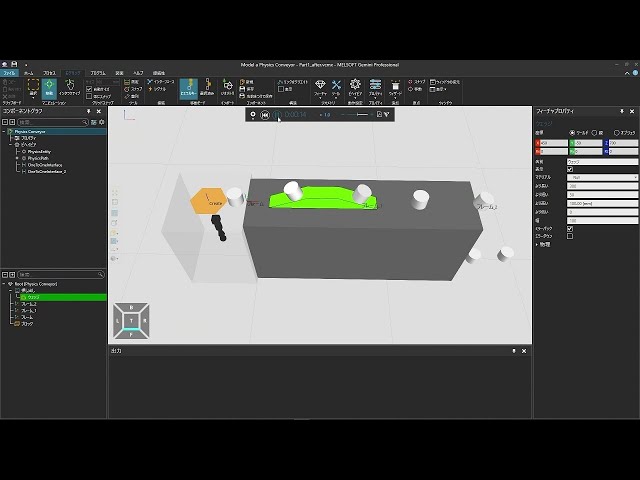
物理の影響を受けるフィーダーを作成しよう(2/2)
物理的な力や物体の影響を受ける部品を作成し、フィーダーからコンベアに流す方法 付属ファイル -

変数ペアのエクスポート・インポートをしてみよう
PLCと通信する変数ペアの一覧表をエクスポート、インポートし、変数ペアを一括で設定する方法 付属ファイル -
録画する時のカメラの視点をPythonで設定しよう
録画する時のカメラの視点(カメラアニメーター)をPythonで設定する方法(関連動画:録画する時のカメラの視点を設定しよう) 付属ファイル -
RT ToolBox3と連携しよう
RT ToolBox3でティーチングしたプログラムと連携して、ロボットを制御する方法 付属ファイル -

インデックステーブルを使ってみよう(1/2)
インデックステーブルのシグナルに、ロボットから値を送信して、回転を制御する方法(Indexing Table) 付属ファイル -

インデックステーブルを使ってみよう(2/2)
インデックステーブルの回転に合わせて、ロボットが製品をプレースする方法(Indexing Table) 付属ファイル -
オーバレイメニューを使用して、ステートメントを追加しよう
パイソンスクリプト(Python)の外部ファイルを使用して、ロボットのオーバレイメニュー(重ねて表示するメニュー)とステートメントを追加する方法 付属ファイル -

プロセスハンドラを使用して、ロボットを制御しよう
プロセスハンドラーとパイソンスクリプト(Python)を使用して、ロボットを制御する方法 付属ファイル -
ロボットが届く範囲を確認しよう(1/5)
ロボットとポジショナをインタフェース接続して、ロボットがポジショナに届く範囲を確認する方法 付属ファイル -
ロボットが届く範囲を確認しよう(2/5)
ロボットの可動域を可視化し、ポジショナに届く範囲を確認する方法 付属ファイル -
ロボットが届く範囲を確認しよう(3/5)
ロボットのジョイントを動かして、ロボットがポジショナに届く範囲を確認する方法 付属ファイル -
ロボットが届く範囲を確認しよう(4/5)
ロボットの特異点を回避する方法 付属ファイル -
ロボットが届く範囲を確認しよう(5/5)
ロボットのジョイントが制限を超えたときの対処方法 付属ファイル -
ロボットでピック&プレイスしてみよう
ロボットで部品を掴む、離す動作を設定する方法 付属ファイル -
ロボットでワークを積み上げてみよう
ロボットで部品を積み上げる方法 付属ファイル -

ロボットで製品を塗装しよう
Gemini Premiumの機能です。
Paint Gun(塗装ガン)をロボットに取り付け、板に塗装する方法 付属ファイル -
ロボットで複数のワークを同時に掴んでみよう
ロボットで複数の部品を同時に掴む方法 付属ファイル -
ロボットで搬送するワークの個数を変更しよう
ロボットで搬送するワークの個数を、シミュレーション中に変更する方法(マルチグラスプ、ボリュームサイズの検出、検出容積を表示)
(関連動画:ロボットで複数のワークを同時に掴んでみよう) 付属ファイル -
ロボットにシグナルを接続してみよう(1/2)
ロボットにセンサーやコンベアのシグナルを接続する方法(1回目/全2回) 付属ファイル -
ロボットにシグナルを接続してみよう(2/2)
ロボットにセンサーやコンベアのシグナルを接続する方法(2回目/全2回) 付属ファイル -

ロボットにツールを取り付けて設定してみよう
ロボットのアームの先端にツールを取り付けて動かす設定方法 付属ファイル -

ロボットに外部軸を接続しよう
ロボットに外部軸を接続して、外部軸の動作を制御する方法 付属ファイル -
ロボットのジョイントをPythonで動かそう(1/2)
Pythonスクリプトを使用して、ロボットのジョイントや外部軸(レール、ロボットツール)を動かす方法(Joints、ExternalController) 付属ファイル -
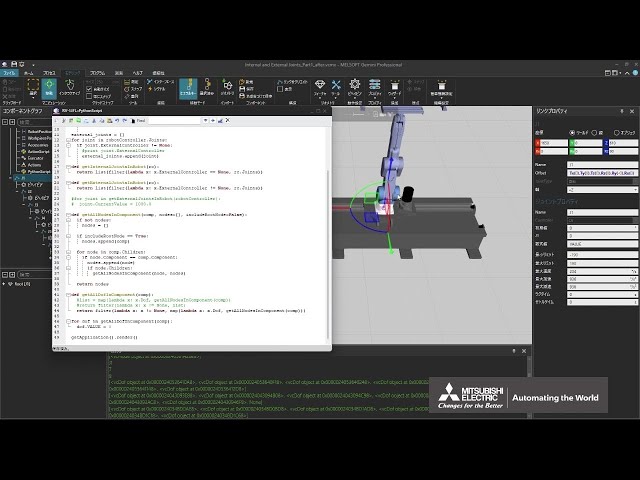
ロボットのジョイントをPythonで動かそう(2/2)
Pythonスクリプトを使用して、ロボットのジョイントや外部軸(レール、ロボットツール)を動かす方法(Dof、findNode、Children) 付属ファイル -
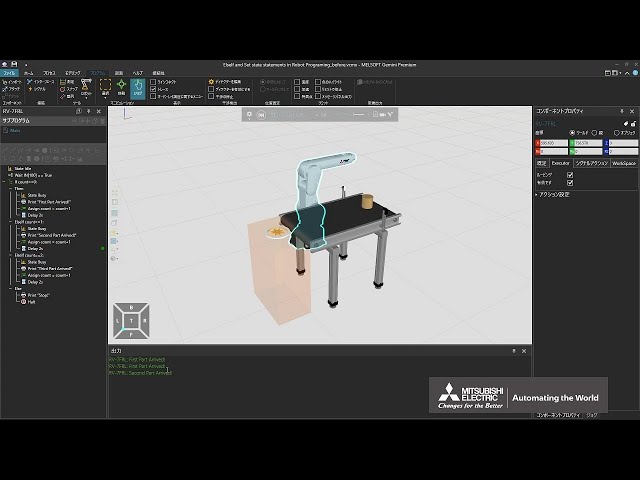
ロボットのプログラムを使用し、統計情報を表示しよう(1/2)
ロボットの動作の条件分岐のElseIfの使用方法と、統計情報の設定方法 付属ファイル -
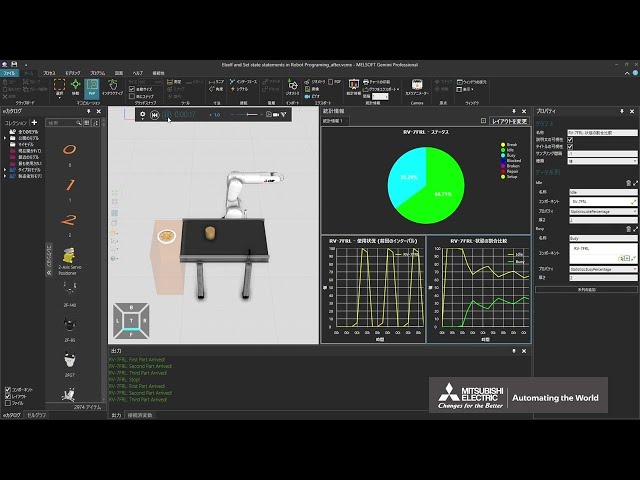
ロボットのプログラムを使用し、統計情報を表示しよう(2/2)
ロボットの稼働状況を統計情報で設定し、グラフ表示する方法 付属ファイル -
ロボットの動作経路の計画と追跡をしてみよう
ロボットの動作経路を計画する方法と、その経路を追跡する方法 付属ファイル -

ロボットの外部TCPを使ってみよう
ロボットのアームに付けた外部ツールの中心点を使用して、ティーチングする方法 付属ファイル -

ロボットの重力プロパティを理解しよう
ロボットが部品を離す際の重力方向の設定方法 付属ファイル -
ロボットの衝突を検知してみよう
ロボットと周辺機器の干渉を検出する方法 付属ファイル -

ロボットの設定をしてみよう
ロボットの動作のティーチングを行う方法 付属ファイル -

ロボットの設定項目について知ろう
ロボットのコンポーネントプロパティを設定する方法
(関連動画:ロボットの設定方法の基礎を学ぼう、ロボットを制御するコントローラーについて知ろう(1/3)~(3/3)、アセンブリについて知ろう、アセンブリ機能を使ってみよう、組み立てや分解ができる製品を定義しよう、複数のパーツを使用して製品を組み立てよう、ロボットにツールを取り付けて設定してみよう、AGVを作ってみよう(2/12)、ロボットが届く範囲を確認しよう(2/5)) -
ロボットの設定方法の基礎を学ぼう
ロボットのティーチング等、基礎の設定方法
(関連動画:ロボットでピック&プレイスしてみよう、ロボットを置き換えてみよう、ロボットにツールを取り付けて設定してみよう) 付属ファイル -
ロボットの動作にifを入れてみよう
ロボットの動作にifを入れて、条件分岐をさせる方法 付属ファイル -
ロボットの動作に条件をつけてみよう
ロボットの動作に条件をつける方法 付属ファイル -
ロボットの動作を遅延させてみよう
ロボットの動作の間に、指定した時間の間は動作しない、遅延をさせる方法 付属ファイル -
ロボットプログラムでコメントとプリントを使ってみよう
ロボットプログラムに注釈を入れる方法と、シミュレーション実行中にメッセージを出力する方法 付属ファイル -
ロボットプログラムでツール定義ステートメントを使ってみよう
ロボットの先端につけるツールをシミュレーション中に変更する時などに、ツールの中心位置の設定を変更する方法 -
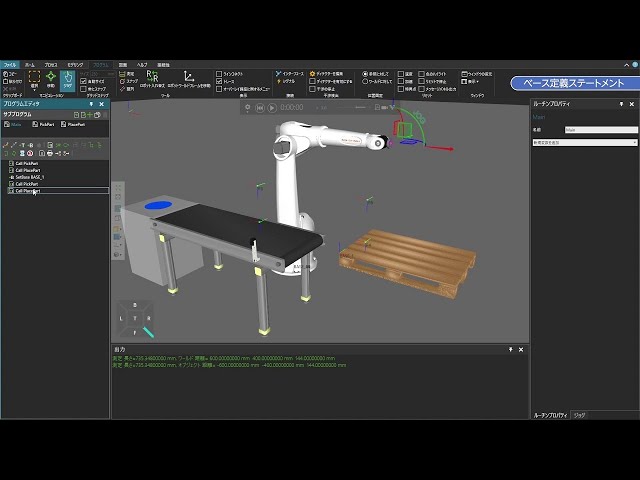
ロボットプログラムでベース定義ステートメントを使ってみよう
ロボットが部品を積み上げる時などに、ロボットの動きの中心位置の設定を変更する方法 付属ファイル -

ロボットプログラムで同期ステートメントを使ってみよう
ロボットプログラムの実行を、他のロボットのプログラムと同期させる方法 付属ファイル -
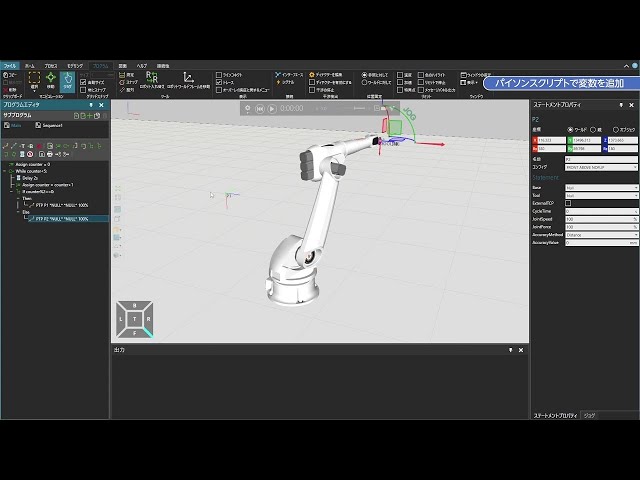
ロボットプログラムに変数を追加してみよう
ロボットプログラムに変数を追加する方法 付属ファイル -
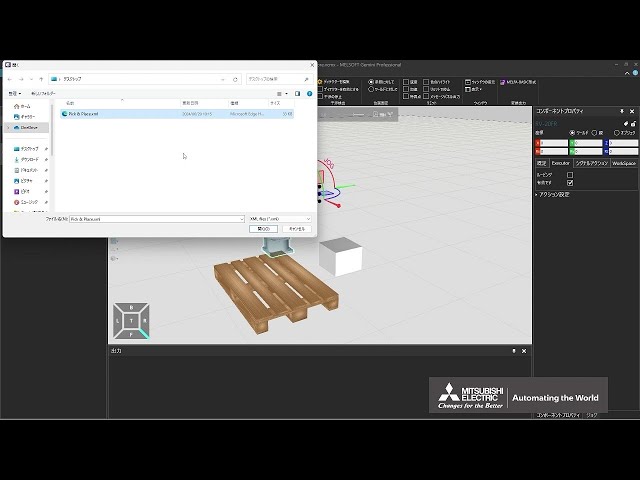
ロボットプログラムのエクスポートとインポートをしてみよう
ロボットプログラムをXML形式でエクスポートし、別のロボットにインポートする方法 付属ファイル -
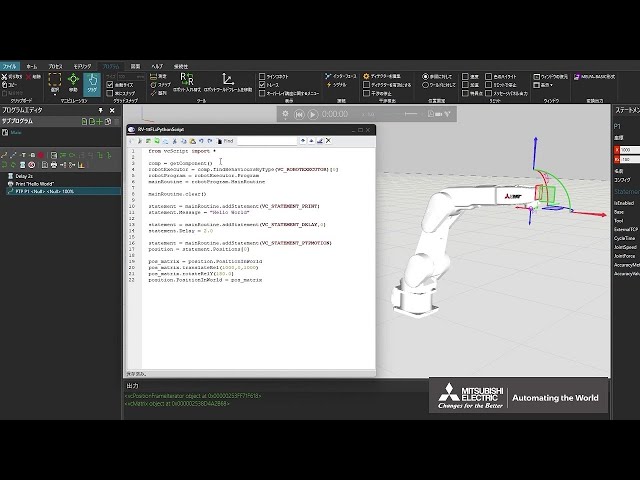
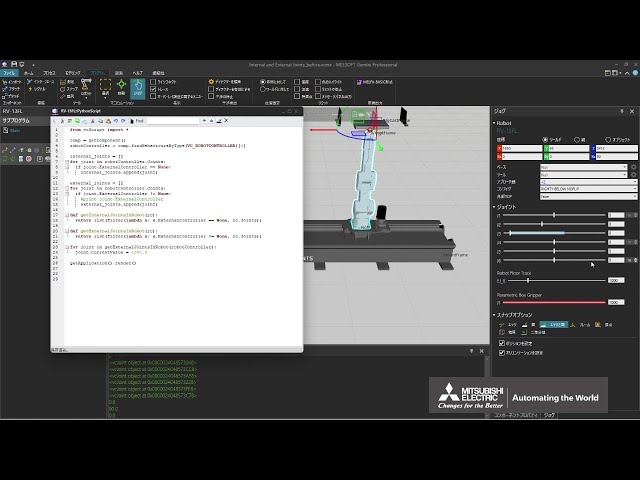
ロボットプログラムをPythonで記述してみよう(1/2)
ロボットをパイソンスクリプト(Python)を用いて制御して、移動させる方法(VC_ROBOTEXECUTOR)
(関連動画:ロボットをPythonで制御しよう(1/3)) 付属ファイル -
ロボットプログラムをPythonで記述してみよう(2/2)
ロボットをパイソンスクリプト(Python)を用いて制御して、サブルーチンを作成する方法
(関連動画:ロボットをPythonで制御しよう(1/3)) 付属ファイル -
ロボットプログラムをWhileを使ってループさせてみよう
ロボットプログラムをWhileを使ってループさせることで、同じ動作を繰り返し実行させる方法 付属ファイル -

ロボットプログラムを読み取ろう(1/3)
ロボットプログラムをパイソンスクリプト(Python)を用いて読み取る方法(ロボットエグゼキュータ、メインルーチンのステートメント)
(関連動画:ロボットをPythonで制御しよう(1/3)。ロボットをPythonで制御しよう(2/3)、ロボットをPythonで制御しよう(3/3)) 付属ファイル -

ロボットプログラムを読み取ろう(2/3)
ロボットプログラムをパイソンスクリプト(Python)を用いて読み取る方法(全てのステートメント)
(関連動画:ロボットをPythonで制御しよう(1/3)。ロボットをPythonで制御しよう(2/3)、ロボットをPythonで制御しよう(3/3)) 付属ファイル -

ロボットプログラムを読み取ろう(3/3)
ロボットプログラムをパイソンスクリプト(Python)を用いて読み取る方法(モーションステートメント、ソースコードのpyファイル保存)
(関連動画:ロボットをPythonで制御しよう(1/3)。ロボットをPythonで制御しよう(2/3)、ロボットをPythonで制御しよう(3/3)) 付属ファイル -
ロボットプログラム実行中の干渉を自動で解決しよう
Gemini 1.48以降の機能です。
ロボットプログラムの干渉を回避する経路を生成する方法(経由パスを解決する) 付属ファイル -
ロボットをPythonで制御して製品を整列してみよう(1/2)
ロボットをパイソンスクリプト(Python)で制御して、コンベア上の製品を持ち上げる方法(pickMovingPart)
(関連動画:ロボットプログラムをPythonで記述してみよう、ロボットをPythonで制御しよう(2/3)) 付属ファイル -
ロボットをPythonで制御して製品を整列してみよう(2/2)
ロボットをパイソンスクリプト(Python)で制御して、製品の向きを変えてコンベア上に置く方法(place)
(関連動画:ロボットプログラムをPythonで記述してみよう、ロボットをPythonで制御しよう(2/3)) 付属ファイル -
ロボットを置き換えてみよう
ティーチングしたロボットを別の機種に置き換える方法 付属ファイル -
移動している製品の上に製品を乗せよう(1/2)
Pythonスクリプトを使用して、コンベア上に流れているワークをロボットでピックアップする方法についての説明
(関連動画:ロボットプログラムをPythonで記述してみよう、ロボットをPythonで制御して製品を整列してみよう) 付属ファイル -
移動している製品の上に製品を乗せよう(2/2)
Pythonスクリプトを使用して、コンベア上に流れているワークをロボットでピックアップし、次に流れるワークの上に積み上げる方法についての説明
(関連動画:ロボットプログラムをPythonで記述してみよう、ロボットをPythonで制御して製品を整列してみよう) 付属ファイル -
複数のロボットやPLCと連携しよう
RT ToolBox3で複数のロボット、GX Works3で複数のPLCと連携する方法
(関連動画:RT ToolBox3と連携しよう、コンベアを作ってシーケンサと繋いでみよう) 付属ファイル -

三菱電機のロボットプログラムを出力しよう
三菱電機のロボットの動きをGeminiでティーチングして、MELFA-BASIC形式に変換出力し、RT ToolBox3で実行する方法 付属ファイル